-
1 отказ линии
отказ линии
Период потери последовательных пакетов, который может длиться несколько секунд, а иногда и несколько минут. Модель сети имитирует эффект отказа линии в основном сегменте посредством выбрасывания блоков последовательных пакетов во время отказа линии (МСЭ-T G.1050).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
Русско-английский словарь нормативно-технической терминологии > отказ линии
-
2 отказ в разъединении
отказ в разъединении
Неудачная попытка разрыва соединения, возникающая вследствие неисправности оборудования. Это приводит к тому, что период разъединения линии становятся чрезвычайно большим.
[Л.М. Невдяев. Телекоммуникационные технологии. Англо-русский толковый словарь-справочник. Под редакцией Ю.М. Горностаева. Москва, 2002]Тематики
- электросвязь, основные понятия
EN
Русско-английский словарь нормативно-технической терминологии > отказ в разъединении
-
3 отказ канала связи
Русско-английский военно-политический словарь > отказ канала связи
-
4 функциональный отказ технологической системы
- Défaillance fonctionnelle d’un système technologique
- défaillance fonctionnelle d'un systéme technologique
функциональный отказ технологической системы
функциональный отказ
Отказ технологической системы, в результате которого наступает прекращение ее функционирования, не предусмотренное регламентированными условиями производства или в конструкторской документации.Функциональный отказ технологической системы проявляется в полном или частичном прекращении ее функционирования. Примером частичного прекращения функционирования может служить поломка одного из инструментов при обработке деталей на автоматической линии. При этом может продолжаться выпуск продукции, но без обработки соответствующих поверхностей детали. К функциональным отказам следует относить и факты превышения сроков запланированных перерывов в работе, т.е. превышение регламентированного времени смены инструмента, установки заготовки (партии заготовок), заданных перерывов на отдых обслуживающего персонала и т.д.
[ ГОСТ 27.004-85]Тематики
- надежность, основные понятия
Обобщающие термины
Синонимы
EN
FR
11. Функциональный отказ технологической системы
Функциональный отказ
Е. Functional failure of technological system
F. Défaillance fonctionnelle d’un système technologique
Источник: ГОСТ 27.004-85: Надежность в технике. Системы технологические. Термины и определения оригинал документа
Русско-французский словарь нормативно-технической терминологии > функциональный отказ технологической системы
-
5 функциональный отказ технологической системы
функциональный отказ технологической системы
функциональный отказ
Отказ технологической системы, в результате которого наступает прекращение ее функционирования, не предусмотренное регламентированными условиями производства или в конструкторской документации.Функциональный отказ технологической системы проявляется в полном или частичном прекращении ее функционирования. Примером частичного прекращения функционирования может служить поломка одного из инструментов при обработке деталей на автоматической линии. При этом может продолжаться выпуск продукции, но без обработки соответствующих поверхностей детали. К функциональным отказам следует относить и факты превышения сроков запланированных перерывов в работе, т.е. превышение регламентированного времени смены инструмента, установки заготовки (партии заготовок), заданных перерывов на отдых обслуживающего персонала и т.д.
[ ГОСТ 27.004-85]Тематики
- надежность, основные понятия
Обобщающие термины
Синонимы
EN
FR
Русско-английский словарь нормативно-технической терминологии > функциональный отказ технологической системы
-
6 широковещательное объектно-ориентированное сообщение о событии на подстанции
GOOSE-сообщение
-
[Интент]
широковещательное объектно-ориентированное сообщение о событии на подстанции
Широковещательный высокоскоростной внеочередной отчет, содержащий статус каждого из входов, устройств пуска, элементов выхода и реле, реальных и виртуальных.
Примечание. Этот отчет выдается многократно последовательно, как правило, сразу после первого отчета с интервалами 2, 4, 8,…, 60000 мс. Значение задержки первого повторения является конфигурируемым. Такой отчет обеспечивает выдачу высокоскоростных сигналов отключения с высокой вероятностью доставки.
[ ГОСТ Р 54325-2011 (IEC/TS 61850-2:2003)]
общие объектно-ориентированные события на подстанции
-
[ ГОСТ Р МЭК 61850-7-2-2009]
GOOSE
Generic Object Oriented Substation Event (стандарт МЭК 61850-8-1)
Протокол передачи данных о событиях на подстанции.
Один из трех протоколов передачи данных, предлагаемых к использованию в МЭК 61850.
Фактически данный протокол служит для замены медных кабельных связей, предназначенных для передачи дискретных сигналов между устройствами.
[ Цифровые подстанции. Проблемы внедрения устройств РЗА]EN
generic object oriented substation event
on the occurrence of any change of state, an IED will multicast a high speed, binary object, Generic Object Oriented Substation Event (GOOSE) report by exception, typically containing the double command state of each of its status inputs, starters, output elements and relays, actual and virtual.
This report is re-issued sequentially, typically after the first report, again at intervals of 2, 4, 8…60000 ms. (The first repetition delay value is an open value it may be either shorter or longer).
A GOOSE report enables high speed trip signals to be issued with a high probability of delivery
[IEC 61850-2, ed. 1.0 (2003-08)]До недавнего времени для передачи дискретных сигналов между терминалами релейной защиты и автоматики (РЗА) использовались дискретные входы и выходные реле. Передача сигнала при этом осуществляется подачей оперативного напряжения посредством замыкания выходного реле одного терминала на дискретный вход другого терминала (далее такой способ передачи будем называть традиционным).
Такой способ передачи информации имеет следующие недостатки:- необходимо большое количество контрольных кабелей, проложенных между шкафами РЗА,
- терминалы РЗА должны иметь большое количество дискретных входов и выходных реле,
- количество передаваемых сигналов ограничивается определенным количеством дискретных входов и выходных реле,
- отсутствие контроля связи между терминалами РЗА,
- возможность ложного срабатывания дискретного входа при замыкании на землю в цепи передачи сигнала.
Информационные технологии уже давно предоставляли возможность для передачи информации между микропроцессорными терминалами по цифровой сети. Разработанный недавно стандарт МЭК 61850 предоставил такую возможность для передачи сигналов между терминалами РЗА.
Стандарт МЭК 61850 использует для передачи данных сеть Ethernet. Внутри стандарта МЭК 61850 предусмотрен такой механизм, как GOOSE-сообщения, которые и используются для передачи сообщений между терминалами РЗА.
Принцип передачи GOOSE-сообщений показан на рис. 1.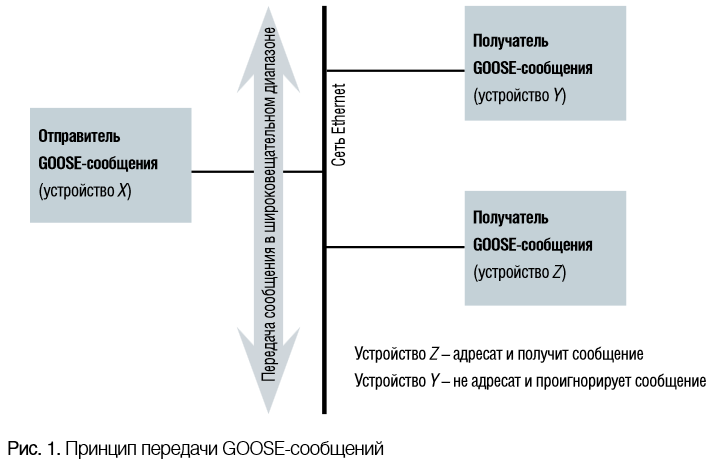
Устройство-отправитель передает по сети Ethernet информацию в широковещательном диапазоне.
В сообщении присутствует адрес отправителя и адреса, по которым осуществляется его передача, а также значение сигнала (например «0» или «1»).
Устройство-получатель получит сообщение, а все остальные устройства его проигнорируют.
Поскольку передача GOOSE-сообщений осуществляется в широковещательном диапазоне, т.е. нескольким адресатам, подтверждение факта получения адресатами сообщения отсутствует. По этой причине передача GOOSE-сообщений в установившемся режиме производится с определенной периодичностью.
При наступлении нового события в системе (например, КЗ и, как следствие, пуска измерительных органов защиты) начинается спонтанная передача сообщения через увеличивающиеся интервалы времени (например, 1 мс, 2 мс, 4 мс и т.д.). Интервалы времени между передаваемыми сообщениями увеличиваются, пока не будет достигнуто предельное значение, определяемое пользователем (например, 50 мс). Далее, до момента наступления нового события в системе, передача будет осуществляется именно с таким периодом. Указанное проиллюстрировано на рис. 2.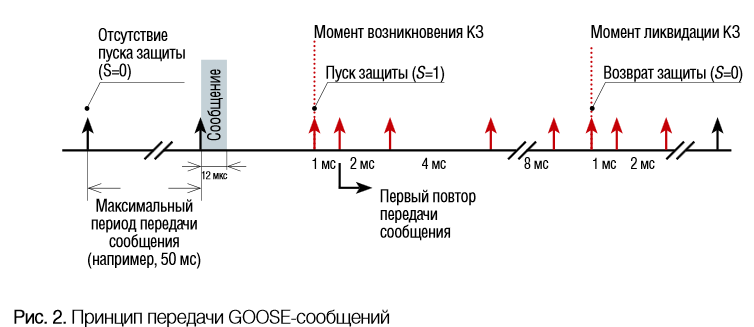
Технология повторной передачи не только гарантирует получение адресатом сообщения, но также обеспечивает контроль исправности линии связи и устройств – любые неисправности будут обнаружены по истечении максимального периода передачи GOOSE-сообщений (с точки зрения эксплуатации практически мгновенно). В случае передачи сигналов традиционным образом неисправность выявляется либо в процессе плановой проверки устройств, либо в случае неправильной работы системы РЗА.
Еще одной особенностью передачи GOOSE-сообщений является использование функций установки приоритетности передачи телеграмм (priority tagging) стандарта Ethernet IEEE 802.3u, которые не используются в других протоколах, в том числе уровня TCP/IP. То есть GOOSE-сообщения идут в обход «нормальных» телеграмм с более высоким приоритетом (см. рис. 3).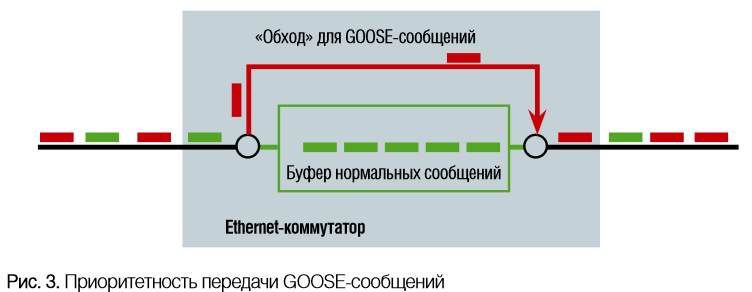
Однако стандарт МЭК 61850 декларирует передачу не только дискретной информации между терминалами РЗА, но и аналоговой. Это означает, что в будущем будет иметься возможность передачи аналоговой информации от ТТ и ТН по цифровым каналам связи. На данный момент готовых решений по передаче аналоговой информации для целей РЗА (в рамках стандарта МЭК 61850) ни один из производителей не предоставляет.
Для того чтобы использовать GOOSE-сообщения для передачи дискретных сигналов между терминалами РЗА необходима достаточная надежность и быстродействие передачи GOOSE-сообщений. Надежность передачи GOOSE-сообщений обеспечивается следующим:- Протокол МЭК 61850 использует Ethernet-сеть, за счет этого выход из строя верхнего уровня АСУ ТП и любого из устройств РЗА не отражается на передаче GOOSE-сообщений оставшихся в работе устройств,
- Терминалы РЗА имеют два независимых Ethernet-порта, при выходе одного из них из строя второй его полностью заменяет,
- Сетевые коммутаторы, к которым подключаются устройства РЗА, соединяются в два независимых «кольца»,
- Разные порты одного терминала РЗА подключаются к разным сетевым коммутаторам, подключенным к разным «кольцам»,
- Каждый сетевой коммутатор имеет дублированное питание от разных источников,
- Во всех устройствах РЗА осуществляется постоянный контроль возможности прохождения каждого сигнала. Это позволяет автоматически определить не только отказы цифровой связи, но и ошибки параметрирования терминалов.
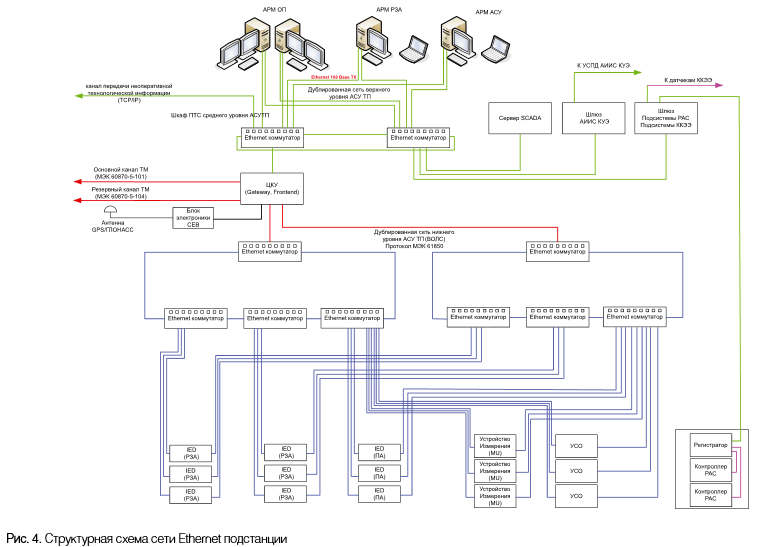
На рис. 4 изображен пример структурной схемы сети Ethernet (100 Мбит/c) подстанции. Отказ в передаче GOOSE-сообщения от одного устройства защиты другому возможен в результате совпадения как минимум двух событий. Например, одновременный отказ двух коммутаторов, к которым подключено одно устройство или одновременный отказ обоих портов одного устройства. Могут быть и более сложные отказы, связанные с одновременным наложением большего количества событий. Таким образом, единичные отказы оборудования не могут привести к отказу передачи GOOSEсообщений. Дополнительно увеличивает надежность то обстоятельство, что даже в случае отказа в передаче GOOSE-сообщения, устройство, принимающее сигнал, выдаст сигнал неисправности, и персонал примет необходимые меры для ее устранения.
Быстродействие.
В соответствии с требованиями стандарта МЭК 61850 передача GOOSE-сообщений должна осуществляться со временем не более 4 мс (для сообщений, требующих быстрой передачи, например, для передачи сигналов срабатывания защит, пусков АПВ и УРОВ и т.п.). Вообще говоря, время передачи зависит от топологии сети, количества устройств в ней, загрузки сети и загрузки вычислительных ресурсов терминалов РЗА, версии операционной системы терминала, коммуникационного модуля, типа центрального процессора терминала, количества коммутаторов и некоторых других аспектов. Поэтому время передачи GOOSE-сообщений должно быть подтверждено опытом эксплуатации.
Используя для передачи дискретных сигналов GOOSE-сообщения необходимо обращать внимание на то обстоятельство, что при использовании аппаратуры некоторых производителей, в случае отказа линии связи, значение передаваемого сигнала может оставаться таким, каким оно было получено в момент приема последнего сообщения.
Однако при отказе связи бывают случаи, когда сигнал должен принимать определенное значение. Например, значение сигнала блокировки МТЗ ввода 6–10 кВ в логике ЛЗШ при отказе связи целесообразно установить в значение «1», чтобы при КЗ на отходящем присоединении не произошло ложного отключения ввода. Так, к примеру, при проектировании терминалов фирмы Siemens изменить значение сигнала при отказе связи возможно с помощью свободно-программируемой CFCлогики (см. рис. 5).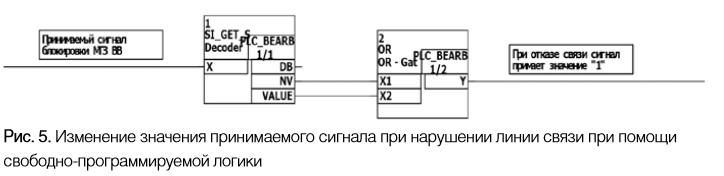
К CFC-блоку SI_GET_STATUS подводится принимаемый сигнал, на выходе блока мы можем получить значение сигнала «Value» и его статус «NV». Если в течение определенного времени не поступит сообщение со значением сигнала, статус сигнала «NV» примет значение «1». Далее статус сигнала и значение сигнала подводятся к элементу «ИЛИ», на выходе которого будет получено значение сигнала при исправности линии связи или «1» при нарушении исправности линии связи. Изменив логику, можно установить значение сигнала равным «0» при обрыве связи.
Использование GOOSE-сообщений предъявляет специальные требования к наладке и эксплуатации устройств РЗА. Во многом процесс наладки становится проще, однако при выводе устройства из работы необходимо следить не только за выводом традиционных цепей, но и не забывать отключать передачу GOOSE-сообщений.
При изменении параметрирования одного устройства РЗА необходимо производить загрузку файла параметров во все устройства, с которыми оно было связано.
В нашей стране имеется опыт внедрения и эксплуатации систем РЗА с передачей дискретных сигналов с использованием GOOSE-сообщений. На первых объектах GOOSE-сообщения использовались ограниченно (ПС 500 кВ «Алюминиевая»).
На ПС 500 кВ «Воронежская» GOOSEсообщения использовались для передачи сигналов пуска УРОВ, пуска АПВ, запрета АПВ, действия УРОВ на отключение смежного элемента, положения коммутационных аппаратов, наличия/отсутствия напряжения, сигналы ЛЗШ, АВР и т.п. Кроме того, на ОРУ 500 кВ и 110 кВ ПС «Воронежская» были установлены полевые терминалы, в которые собиралась информация с коммутационного оборудования и другая дискретная информация с ОРУ (рис. 6). Далее информация с помощью GOOSE-сообщений передавалась в терминалы РЗА, установленные в ОПУ подстанции (рис. 7, 8).
GOOSE-сообщения также были использованы при проектировании уже введенных в эксплуатацию ПС 500 кВ «Бескудниково», ПС 750 кВ «Белый Раст», ПС 330кВ «Княжегубская», ПС 220 кВ «Образцово», ПС 330 кВ «Ржевская». Эта технология применяется и при проектировании строящихся и модернизируемых подстанций ПС 500 кВ «Чагино», ПС 330кВ «Восточная», ПС 330 кВ «Южная», ПС 330 кВ «Центральная», ПС
330 кВ «Завод Ильич» и многих других.
Основные преимущества использования GOOSE-сообщений:- позволяет снизить количество кабелей вторичной коммутации на ПС;
- обеспечивает лучшую помехозащищенность канала связи;
- позволяет снизить время монтажных и пусконаладочных работ;
- исключает проблему излишнего срабатывания дискретных входов терминалов из-за замыканий на землю в цепях оперативного постоянного тока;
- убирает зависимость количества передаваемых сигналов от количества дискретных входов и выходных реле терминалов;
- обеспечивает возможность реконструкции и изменения связей между устройствами РЗА без прокладки дополнительных кабельных связей и повторного монтажа в шкафах;
- позволяет использовать МП терминалы РЗА с меньшим количеством входов и выходов (уменьшение габаритов и стоимости устройства);
- позволяет контролировать возможность прохождения сигнала (увеличивается надежность).
Безусловно, для окончательных выводов должен появиться достаточный опыт эксплуатации. В настоящее время большинство производителей устройств РЗА заявили о возможности использования GOOSEсообщений. Стандарт МЭК 61850 определяет передачу GOOSE-сообщений между терминалами разных производителей. Использование GOOSE-сообщений для передачи дискретных сигналов – это качественный скачок в развитии систем РЗА. С развитием стандарта МЭК 61850, переходом на Ethernet 1 Гбит/сек, с появлением новых цифровых ТТ и ТН, новых выключателей с возможностью подключения их блока управления к шине процесса МЭК 61850, эффективность использования GOOSE-сообщений намного увеличится. Облик будущих подстанций представляется с минимальным количеством контрольных кабелей, с передачей всех сообщений между устройствами РЗА, ТТ, ТН, коммутационными аппаратами через цифровую сеть. Устройства РЗА будут иметь минимальное количество выходных реле и дискретных входов
[ http://romvchvlcomm.pbworks.com/f/goosepaper1.pdf]
В стандарте определены два способа передачи данных напрямую между устройствами: GOOSE и GSSE. Это тоже пример наличия двух способов для реализации одной функции. GOOSE - более новый способ передачи сообщений, разработан специально для МЭК 61850. Способ передачи сообщений GSSE ранее присутствовал в стандарте UCA 2.0, являющимся одним из предшественников МЭК 61850. По сравнению с GSSE, GOOSE имеет более простой формат (Ethernet против стека OSI протоколов) и возможность передачи различных типов данных. Вероятно, способ GSSE включили в МЭК 61850 для того, чтобы производители, имеющие в своих устройствах протокол UCA 2.0, могли сразу декларировать соответствие МЭК 61850. В настоящее время все производители используют только GOOSE для передачи сообщений между устройствами.
Для выбора списка передаваемых данных в GOOSE, как и в отчѐтах, используются наборы данных. Однако тут требования уже другие. Время обработки GOOSE-сообщений должно быть минимальным, поэтому логично передавать наиболее простые типы данных. Обычно передаѐтся само значение сигнала и в некоторых случаях добавляется поле качества. Метка времени обычно включается в набор данных.
...
В устройствах серии БЭ2704 в передаваемых GOOSE-сообщениях содержатся данные типа boolean. Приниматься могут данные типа boolean, dbpos, integer.
Устоявшаяся тенденция существует только для передачи дискретной информации. Аналоговые данные пока передают немногие производители, и поэтому устоявшаяся тенденция в передаче аналоговой информации в данный момент отсутствует.
[ Источник]
Тематики
Синонимы
EN
Русско-английский словарь нормативно-технической терминологии > широковещательное объектно-ориентированное сообщение о событии на подстанции
-
7 полевая шина
полевая шина
-
[Интент]
полевая магистраль по зарубежной терминологии
Имеет много терминов-синонимов и обозначает специализированные последовательные магистрали малых локальных сетей (МЛС), ориентированны на сопряжение с ЭВМ рассредоточенных цифровых датчиков и исполнительных органов. Магистрали рассчитаны на применение в машиностроении, химической промышленности, в системах автоматизации зданий, крупных установках, бытовых электронных системах, системах автомобильного оборудования, малых контрольно-измерительных и управляющих системах на основе встраиваемых микроЭВМ и т. п. Основными магистралями являются Bitbus, MIL STD-1553В. В настоящее время рабочими группами IEC (65С и SP-50) стандартизируются два основных типа МЛС: высокоскоростные и низкоскоростные, ориентированные на датчики.
[Е.С.Алексеев, А.А.Мячев. Англо-русский толковый словарь по системотехнике ЭВМ. Москва 1993]ЧТО ТАКОЕ FIELDВUS?
Так пишется оригинальный термин, который в русском переводе звучит как «промышленная сеть». Fieldbus — это не какой-то определенный протокол передачи данных и не тип сетевой архитектуры, этот термин не принадлежит ни одной отдельно взятой компании и обозначает скорее сферу применения, чем какую-либо конкретную сетевую технологию.
Давайте попробуем сформулировать лишь некоторые основные требования, которые можно предъявить к «идеальной» промышленной сети.
1. Производительность.
2. Предсказуемость времени доставки информации.
3. Помехоустойчивость.
4. Доступность и простота организации физического канала передачи данных.
5. Максимальный сервис для приложений верхнего уровня.
6. Минимальная стоимость устройств аппаратной реализации, особенно на уровне контроллеров.
7. Возможность получения «распределенного интеллекта», путем предоставления максимального доступа к каналу нескольким ведущим узлам.
8.Управляемость и самовосстановление в случае возникновения нештатных ситуаций.
[Сергей Гусев. Краткий экскурс в историю промышленных сетей]
Международный стандарт IEC 61158 “Fieldbus for use in Industrial Control Systems” («Промышленная управляющая сеть для применения в промышленных системах управления») определяет восемь независимых и несовместимых коммуникационных технологий, из которых FOUNDATION Fieldbus H1 и PROFIBUS PA стали в значительной степени преобладающими в различных отраслях промышленности.
Эти промышленные сети соответствуют требованиям стандарта IEC 61158 2, который устанавливает физический уровень так называемых промышленных сетей H1.
Основными требованиями к промышленным сетям H1 являются:
● передача данных и питание устройств нижнего уровня по одной витой паре;
● гибкость при проектировании различных топологий сети;
● совместимость всех полевых приборов;
● взрывобезопасность при установкево взрывоопасных зонах;
● распределение одной инфраструктуры на многочисленные сегменты.[Виктор Жданкин. Концепция FieldConnex® для промышленных сетей FOUNDATION Fieldbus H1 и PROFIBUS_PA: повышение производительности и снижение затрат. СТА 2/2009]
Термин полевая шина является дословным переводом английского термина fieldbus.
Термин промышленная сеть является более точным переводом и в настоящее время именно он используется в профессиональной технической литературе.Промышленная сеть — сеть передачи данных, связывающая различные датчики, исполнительные механизмы, промышленные контроллеры и используемая в промышленной автоматизации. Термин употребляется преимущественно в автоматизированной системе управления технологическими процессами (АСУТП).
Устройства используют сеть для:
- передачи данных, между датчиками, контроллерами и исполнительными механизмами;
- диагностики и удалённого конфигурирования датчиков и исполнительных механизмов;
- калибрования датчиков;
- питания датчиков и исполнительных механизмов;
- связи между датчиками, исполнительными механизмами, ПЛК и АСУ ТП верхнего уровня.
В промышленных сетях для передачи данных применяют:
- электрические линии;
- волоконно-оптические линии;
- беспроводную связь (радиомодемы и Wi-Fi).
Промышленные сети могут взаимодействовать с обычными компьютерными сетями, в частности использовать глобальную сеть Internet.
[ Википедия]
Главной функцией полевой шины является обеспечение сетевого взаимодействия между контроллерами и удаленной периферией (например, узлами ввода/вывода). Помимо этого, к полевой шине могут подключаться различные контрольно-измерительные приборы ( Field Devices), снабженные соответствующими сетевыми интерфейсами. Такие устройства часто называют интеллектуальными ( Intelligent Field Devices), так как они поддерживают высокоуровневые протоколы сетевого обмена.
Пример полевой шины представлен на рисунке 1.
Рис. 1. Полевая шина.Как уже было отмечено, существует множество стандартов полевых шин, наиболее распространенные из которых приведены ниже:
1. Profibus DP
2. Profibus PA
3. Foundation Fieldbus
4. Modbus RTU
5. HART
6. DeviceNet
Несмотря на нюансы реализации каждого из стандартов (скорость передачи данных, формат кадра, физическая среда), у них есть одна общая черта – используемый алгоритм сетевого обмена данными, основанный на классическом принципе Master-Slave или его небольших модификациях.
Современные полевые шины удовлетворяют строгим техническим требованиям, благодаря чему становится возможной их эксплуатация в тяжелых промышленных условиях. К этим требованиям относятся:- Детерминированность. Под этим подразумевается, что передача сообщения из одного узла сети в другой занимает строго фиксированный отрезок времени. Офисные сети, построенные по технологии Ethernet, - это отличный пример недетерминированной сети. Сам алгоритм доступа к разделяемой среде по методу CSMA/CD не определяет время, за которое кадр из одного узла сети будет передан другому, и, строго говоря, нет никаких гарантий, что кадр вообще дойдет до адресата. Для промышленных сетей это недопустимо. Время передачи сообщения должно быть ограничено и в общем случае, с учетом количества узлов, скорости передачи данных и длины сообщений, может быть заранее рассчитано.
- Поддержка больших расстояний. Это существенное требование, ведь расстояние между объектами управления может порой достигать нескольких километров. Применяемый протокол должен быть ориентирован на использование в сетях большой протяженности.
- Защита от электромагнитных наводок. Длинные линии в особенности подвержены пагубному влиянию электромагнитных помех, излучаемых различными электрическими агрегатами. Сильные помехи в линии могут исказить передаваемые данные до неузнаваемости. Для защиты от таких помех применяют специальные экранированные кабели, а также оптоволокно, которое, в силу световой природы информационного сигнала, вообще нечувствительно к электромагнитным наводкам. Кроме этого, в промышленных сетях должны использоваться специальные методы цифрового кодирования данных, препятствующие их искажению в процессе передачи или, по крайней мере, позволяющие эффективно детектировать искаженные данные принимающим узлом.
- Упрочненная механическая конструкция кабелей и соединителей. Здесь тоже нет ничего удивительного, если представить, в каких условиях зачастую приходиться прокладывать коммуникационные линии. Кабели и соединители должны быть прочными, долговечными и приспособленными для использования в самых тяжелых окружающих условиях (в том числе агрессивных атмосферах).
По типу физической среды полевые шины делятся на два типа:
-
Полевые шины, построенные на базе оптоволоконного кабеля.
Преимущества использования оптоволокна очевидны: возможность построения протяженных коммуникационных линий (протяженностью до 10 км и более); большая полоса пропускания; иммунитет к электромагнитным помехам; возможность прокладки во взрывоопасных зонах.
Недостатки: относительно высокая стоимость кабеля; сложность физического подключения и соединения кабелей. Эти работы должны выполняться квалифицированными специалистами. -
Полевые шины, построенные на базе медного кабеля.
Как правило, это двухпроводной кабель типа “витая пара” со специальной изоляцией и экранированием. Преимущества: удобоваримая цена; легкость прокладки и выполнения физических соединений. Недостатки: подвержен влиянию электромагнитных наводок; ограниченная протяженность кабельных линий; меньшая по сравнению с оптоволокном полоса пропускания.
Итак, перейдем к рассмотрению методов обеспечения отказоустойчивости коммуникационных сетей, применяемых на полевом уровне. При проектировании и реализации этот аспект становится ключевым, так как в большой степени определяет характеристики надежности всей системы управления в целом.
На рисунке 2 изображена базовая архитектура полевой шины – одиночная (нерезервированная). Шина связывает контроллер С1 и четыре узла ввода/вывода IO1-IO4. Очевидно, что такая архитектура наименее отказоустойчива, так как обрыв шины, в зависимости от его локализации, ведет к потере коммуникации с одним, несколькими или всеми узлами шины. В нашем случае в результате обрыва теряется связь с двумя узлами.
Рис. 2. Нерезервированная шина.Здесь важное значение имеет термин “единичная точка отказа” (SPOF, single point of failure). Под этим понимается место в системе, отказ компонента или обрыв связи в котором приводит к нарушению работы всей системы. На рисунке 2 единичная точка отказа обозначена красным крестиком.
На рисунке 3 показана конфигурация в виде дублированной полевой шины, связывающей резервированный контроллер с узлами ввода/вывода. Каждый узел ввода/вывода снабжен двумя интерфейсными модулями. Если не считать сами модули ввода/вывода, которые резервируются редко, в данной конфигурации единичной точки отказа нет.
Рис. 3. Резервированная шина.Вообще, при построении отказоустойчивых АСУ ТП стараются, чтобы единичный отказ в любом компоненте (линии связи) не влиял на работу всей системы. В этом плане конфигурация в виде дублированной полевой шины является наиболее распространенным техническим решением.
На рисунке 4 показана конфигурация в виде оптоволоконного кольца. Контроллер и узлы ввода/вывода подключены к кольцу с помощью резервированных медных сегментов. Для состыковки медных сегментов сети с оптоволоконными применяются специальные конверторы среды передачи данных “медь<->оптоволокно” (OLM, Optical Link Module). Для каждого из стандартных протоколов можно выбрать соответствующий OLM.
Рис. 4. Одинарное оптоволоконное кольцо.Как и дублированная шина, оптоволоконное кольцо устойчиво к возникновению одного обрыва в любом его месте. Система такой обрыв вообще не заметит, и переключение на резервные интерфейсные и коммуникационные модули не произойдет. Более того, обрыв одного из двух медных сегментов, соединяющих узел с оптоволоконным кольцом, не приведет к потере связи с этим узлом. Однако второй обрыв кольца может привести к неработоспособности системы. В общем случае два обрыва кольца в диаметрально противоположных точках ведут к потере коммуникации с половиной подключенных узлов.
На рисунке 5 изображена конфигурация с двойным оптическим кольцом. В случае если в результате образования двух точек обрыва первичное кольцо выходит из строя, система переключается на вторичное кольцо. Очевидно, что такая архитектура сети является наиболее отказоустойчивой. На рисунке 5 пошагово изображен процесс деградации сети. Обратите внимание, сколько отказов система может перенести до того, как выйдет из строя.
Рис. 5. Резервированное оптоволоконное кольцо.[ http://kazanets.narod.ru/NT_PART1.htm]
Тематики
Синонимы
EN
Русско-английский словарь нормативно-технической терминологии > полевая шина
-
8 автоматическое повторное включение
- Wiedereinschaltung, automatische
- selbsttätiges Wiederschließen (eines mechanischen Schaltgerätes)
- Kurzunterbrechung
- automatische Wiedereinschaltung
автоматическое повторное включение
АПВ
Коммутационный цикл, при котором выключатель вслед за его отключением автоматически включается через установленный промежуток времени (О - tбт - В).
[ ГОСТ Р 52565-2006]
автоматическое повторное включение
АПВ
Автоматическое включение аварийно отключившегося элемента электрической сети
[ОАО РАО "ЕЭС России" СТО 17330282.27.010.001-2008]
(автоматическое) повторное включение
АПВ
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва]EN
automatic reclosing
automatic reclosing of a circuit-breaker associated with a faulted section of a network after an interval of time which permits that section to recover from a transient fault
[IEC 61936-1, ed. 1.0 (2002-10)]
[IEV 604-02-32]
auto-reclosing
the operating sequence of a mechanical switching device whereby, following its opening, it closes automatically after a predetermined time
[IEC 62271-100, ed. 2.0 (2008-04)]
auto-reclosing (of a mechanical switching device)
the operating sequence of a mechanical switching device whereby, following its opening, it closes automatically after a predetermined time
[IEV number 441-16-10]FR
réenclenchement automatique
refermeture du disjoncteur associé à une fraction de réseau affectée d'un défaut, par un dispositif automatique après un intervalle de temps permettant la disparition d'un défaut fugitif
[IEC 61936-1, ed. 1.0 (2002-10)]
[IEV 604-02-32]
refermeture automatique
séquence de manoeuvres par laquelle, à la suite d’une ouverture, un appareil mécanique de connexion est refermé automatiquement après un intervalle de temps prédéterminé
[IEC 62271-100, ed. 2.0 (2008-04)]
refermeture automatique (d'un appareil mécanique de connexion)
séquence de manoeuvres par laquelle, à la suite d'une ouverture, un appareil mécanique de connexion est refermé automatiquement après un intervalle de temps prédéterminé
[IEV number 441-16-10]
Автоматическое повторное включение (АПВ), быстрое автоматическое обратное включение в работу высоковольтных линий электропередачи и электрооборудования высокого напряжения после их автоматического отключения; одно из наиболее эффективных средств противоаварийной автоматики. Повышает надёжность электроснабжения потребителей и восстанавливает нормальный режим работы электрической системы. Во многих случаях после быстрого отключения участка электрической системы, на котором возникло короткое замыкание в результате кратковременного нарушения изоляции или пробоя воздушного промежутка, при последующей подаче напряжения повторное короткое замыкание не возникает. АПВ выполняется с помощью автоматических устройств, воздействующих на высоковольтные выключатели после их аварийного автоматического отключения от релейной защиты. Многие из этих автоматических устройств обеспечивают АПВ при самопроизвольном отключении выключателей, например при сильных сотрясениях почвы во время близких взрывов, землетрясениях и т. п. Эффективность АПВ тем выше, чем быстрее следует оно за аварийным отключением, т. е. чем меньше время перерыва питания потребителей. Это время зависит от длительности цикла АПВ. В электрических системах применяют однократное АПВ — с одним циклом, двукратное — при неуспешном первом цикле, и трёхкратное — с тремя последовательными циклами. Цикл АПВ — время от момента подачи сигнала на отключение до замыкания цепи главными контактами выключателя — состоит из времени отключения и включения выключателя и времени срабатывания устройства АПВ. Длительность бестоковой паузы, когда потребитель не получает электроэнергию, выбирается такой, чтобы успело произойти восстановление изоляции (деионизация среды) в месте короткого замыкания, привод выключателя после отключения был бы готов к повторному включению, а выключатель к моменту замыкания его главных контактов восстановил способность к отключению поврежденной цепи в случае неуспешного АПВ. Время деионизации зависит от среды, климатических условий и других факторов. Время восстановления отключающей способности выключателя определяется его конструкцией и количеством циклов АПВ., предшествовавших данному. Обычно длительность 1-го цикла не превышает 0,5—1,5 сек, 2-го — от 10 до 15 сек, 3-го — от 60 до 120 сек.
Наиболее распространено однократное АПВ, обеспечивающее на воздушных линиях высокого напряжения (110 кв и выше) до 86 %, а на кабельных линиях (3—10 кв) — до 55 % успешных включений. Двукратное АПВ обеспечивает во втором цикле до 15 % успешных включений. Третий цикл увеличивает число успешных включений всего на 3—5 %. На линиях электропередачи высокого напряжения (от 110 до 500 кВ) применяется однофазовое АПВ; при этом выключатели должны иметь отдельные приводы на каждой фазе.
Применение АПВ экономически выгодно, т. к. стоимость устройств АПВ и их эксплуатации несравнимо меньше ущерба из-за перерыва в подаче электроэнергии.
[ БСЭ]
НАЗНАЧЕНИЕ И ОБЛАСТЬ ПРИМЕНЕНИЯ АПВ
Опыт эксплуатации сетей высокого напряжения показал, что если поврежденную линию электропередачи быстро отключить, т. е. снять с нее напряжение, то в большинстве случаев повреждение ликвидируется. При этом электрическая дуга, возникавшая в месте короткого замыкания (КЗ), не успевает вызвать существенных разрушений оборудования, препятствующих обратному включению линии под напряжение.
Самоустраняющиеся повреждения принято называть неустойчивыми. Такие повреждения возникают в результате грозовых перекрытий изоляции, схлестывания проводов при ветре и сбрасывании гололеда, падения деревьев, задевания проводов движущимися механизмами.
Данные о повреждаемости воздушных линий электропередачи (ВЛ) за многолетний период эксплуатации показывают, что доля неустойчивых повреждений весьма высока и составляет 50—90 %.
При ликвидации аварии оперативный персонал производит обычно опробование линии путем включения ее под напряжение, так как отыскание места повреждения на линии электропередачи путем ее обхода требует длительного времени, а многие повреждения носят неустойчивый характер. Эту операцию называют повторным включением.
Если КЗ самоустранилось, то линия, на которой произошло неустойчивое повреждение, при повторном включении остается в работе. Поэтому повторные включения при неустойчивых повреждениях принято называть успешными.
На ВЛ успешность повторного включения сильно зависит от номинального напряжения линий. На линиях ПО кВ и выше успешность повторного включения значительно выше, чем на ВЛ 6—35 кВ. Высокий процент успешных повторных включений в сетях высокого и сверхвысокого напряжения объясняется быстродействием релейной защиты (как правило, не более 0,1-0,15 с), большим сечением проводов и расстояний между ними, высокой механической прочностью опор. [Овчинников В. В., Автоматическое повторное включение. — М.:Энергоатомиздат, 1986.— 96 с: ил. — (Б-ка электромонтера; Вып. 587). Энергоатомиздат, 1986]
АВТОМАТИЧЕСКОЕ ПОВТОРНОЕ ВКЛЮЧЕНИЕ (АПВ)
3.3.2. Устройства АПВ должны предусматриваться для быстрого восстановления питания потребителей или межсистемных и внутрисистемных связей путем автоматического включения выключателей, отключенных устройствами релейной защиты.
Должно предусматриваться автоматическое повторное включение:
1) воздушных и смешанных (кабельно-воздушных) линий всех типов напряжением выше 1 кВ. Отказ от применения АПВ должен быть в каждом отдельном случае обоснован. На кабельных линиях 35 кВ и ниже АПВ рекомендуется применять в случаях, когда оно может быть эффективным в связи со значительной вероятностью повреждений с образованием открытой дуги (например, наличие нескольких промежуточных сборок, питание по одной линии нескольких подстанций), а также с целью исправления неселективного действия защиты. Вопрос о применении АПВ на кабельных линиях 110 кВ и выше должен решаться при проектировании в каждом отдельном случае с учетом конкретных условий;
2) шин электростанций и подстанций (см. 3.3.24 и 3.3.25);
3) трансформаторов (см. 3.3.26);
4) ответственных электродвигателей, отключаемых для обеспечения самозапуска других электродвигателей (см. 3.3.38).
Для осуществления АПВ по п. 1-3 должны также предусматриваться устройства АПВ на обходных, шиносоединительных и секционных выключателях.
Допускается в целях экономии аппаратуры выполнение устройства группового АПВ на линиях, в первую очередь кабельных, и других присоединениях 6-10 кВ. При этом следует учитывать недостатки устройства группового АПВ, например возможность отказа в случае, если после отключения выключателя одного из присоединений отключение выключателя другого присоединения происходит до возврата устройства АПВ в исходное положение.
3.3.3. Устройства АПВ должны быть выполнены так, чтобы они не действовали при:
1) отключении выключателя персоналом дистанционно или при помощи телеуправления;
2) автоматическом отключении от релейной защиты непосредственно после включения персоналом дистанционно или при помощи телеуправления;
3) отключении выключателя защитой от внутренних повреждений трансформаторов и вращающихся машин, устройствами противоаварийной автоматики, а также в других случаях отключений выключателя, когда действие АПВ недопустимо. АПВ после действия АЧР (ЧАПВ) должно выполняться в соответствии с 3.3.81.
Устройства АПВ должны быть выполнены так, чтобы была исключена возможностью многократного включения на КЗ при любой неисправности в схеме устройства.
Устройства АПВ должны выполняться с автоматическим возвратом.
3.3.4. При применении АПВ должно, как правило, предусматриваться ускорение действия релейной защиты на случай неуспешного АПВ. Ускорение действия релейной защиты после неуспешного АПВ выполняется с помощью устройства ускорения после включения выключателя, которое, как правило, должно использоваться и при включении выключателя по другим причинам (от ключа управления, телеуправления или устройства АВР). При ускорении защиты после включения выключателя должны быть приняты меры против возможного отключения выключателя защитой под действием толчка тока при включении из-за неодновременного включения фаз выключателя.
Не следует ускорять защиты после включения выключателя, когда линия уже включена под напряжение другим своим выключателем (т. е. при наличии симметричного напряжения на линии).
Допускается не ускорять после АПВ действие защит линий 35 кВ и ниже, выполненных на переменном оперативном токе, если для этого требуется значительное усложнение защит и время их действия при металлическом КЗ вблизи места установки не превосходит 1,5 с.
3.3.5. Устройства трехфазного АПВ (ТАПВ) должны осуществляться преимущественно с пуском при несоответствии между ранее поданной оперативной командой и отключенным положением выключателя; допускается также пуск устройства АПВ от защиты.
3.3.6. Могут применяться, как правило, устройства ТАПВ однократного или двукратного действия (последнее - если это допустимо по условиям работы выключателя). Устройство ТАПВ двукратного действия рекомендуется принимать для воздушных линий, в особенности для одиночных с односторонним питанием. В сетях 35 кВ и ниже устройства ТАПВ двукратного действия рекомендуется применять в первую очередь для линий, не имеющих резервирования по сети.
В сетях с изолированной или компенсированной нейтралью, как правило, должна применяться блокировка второго цикла АПВ в случае замыкания на землю после АПВ первого цикла (например, по наличию напряжений нулевой последовательности). Выдержка времени ТАПВ во втором цикле должна быть не менее 15-20 с.
3.3.7. Для ускорения восстановления нормального режима работы электропередачи выдержка времени устройства ТАПВ (в особенности для первого цикла АПВ двукратного действия на линиях с односторонним питанием) должна приниматься минимально возможной с учетом времени погасания дуги и деионизации среды в месте повреждения, а также с учетом времени готовности выключателя и его привода к повторному включению.
Выдержка времени устройства ТАПВ на линии с двусторонним питанием должна выбираться также с учетом возможного неодновременного отключения повреждения с обоих концов линии; при этом время действия защит, предназначенных для дальнего резервирования, учитываться не должно. Допускается не учитывать разновременности отключения выключателей по концам линии, когда они отключаются в результате срабатывания высокочастотной защиты.
С целью повышения эффективности ТАПВ однократного действия допускается увеличивать его выдержку времени (по возможности с учетом работы потребителя).
3.3.8. На одиночных линиях 110 кВ и выше с односторонним питанием, для которых допустим в случае неуспешного ТАПВ переход на длительную работу двумя фазами, следует предусматривать ТАПВ двукратного действия на питающем конце линии. Перевод линии на работу двумя фазами может производиться персоналом на месте или при помощи телеуправления.
Для перевода линии после неуспешного АПВ на работу двумя фазами следует предусматривать пофазное управление разъединителями или выключателями на питающем и приемном концах линии.
При переводе линии на длительную работу двумя фазами следует при необходимости принимать меры к уменьшению помех в работе линий связи из-за неполнофазного режима работы линии. С этой целью допускается ограничение мощности, передаваемой по линии в неполнофазном режиме (если это возможно по условиям работы потребителя).
В отдельных случаях при наличии специального обоснования допускается также перерыв в работе линии связи на время неполнофазного режима.
3.3.9. На линиях, отключение которых не приводит к нарушению электрической связи между генерирующими источниками, например на параллельных линиях с односторонним питанием, следует устанавливать устройства ТАПВ без проверки синхронизма.
3.3.10. На одиночных линиях с двусторонним питанием (при отсутствии шунтирующих связей) должен предусматриваться один из следующих видов трехфазного АПВ (или их комбинаций):
а) быстродействующее ТАПВ (БАПВ)
б) несинхронное ТАПВ (НАПВ);
в) ТАПВ с улавливанием синхронизма (ТАПВ УС).
Кроме того, может предусматриваться однофазное АПВ (ОАПВ) в сочетании с различными видами ТАПВ, если выключатели оборудованы пофазным управлением и не нарушается устойчивость параллельной работы частей энергосистемы в цикле ОАПВ.
Выбор видов АПВ производится, исходя из совокупности конкретных условий работы системы и оборудования с учетом указаний 3.3.11-3.3.15.
3.3.11. Быстродействующее АПВ, или БАПВ (одновременное включение с минимальной выдержкой времени с обоих концов), рекомендуется предусматривать на линиях по 3.3.10 для автоматического повторного включения, как правило, при небольшом расхождении угла между векторами ЭДС соединяемых систем. БАПВ может применяться при наличии выключателей, допускающих БАПВ, если после включения обеспечивается сохранение синхронной параллельной работы систем и максимальный электромагнитный момент синхронных генераторов и компенсаторов меньше (с учетом необходимого запаса) электромагнитного момента, возникающего при трехфазном КЗ на выводах машины.
Оценка максимального электромагнитного момента должна производиться для предельно возможного расхождения угла за время БАПВ. Соответственно запуск БАПВ должен производиться лишь при срабатывании быстродействующей защиты, зона действия которой охватывает всю линию. БАПВ должно блокироваться при срабатывании резервных защит и блокироваться или задерживаться при работе УРОВ.
Если для сохранения устойчивости энергосистемы при неуспешном БАПВ требуется большой объем воздействий от противоаварийной автоматики, применение БАПВ не рекомендуется.
3.3.12. Несинхронное АПВ (НАПВ) может применяться на линиях по 3.3.10 (в основном 110-220 кВ), если:
а) максимальный электромагнитный момент синхронных генераторов и компенсаторов, возникающий при несинхронном включении, меньше (с учетом необходимого запаса) электромагнитного момента, возникающего при трехфазном КЗ на выводах машины, при этом в качестве практических критериев оценки допустимости НАПВ принимаются расчетные начальные значения периодических составляющих токов статора при угле включения 180°;
б) максимальный ток через трансформатор (автотрансформатор) при угле включения 180° меньше тока КЗ на его выводах при питании от шин бесконечной мощности;
в) после АПВ обеспечивается достаточно быстрая ресинхронизация; если в результате несинхронного автоматического повторного включения возможно возникновение длительного асинхронного хода, должны применяться специальные мероприятия для его предотвращения или прекращения.
При соблюдении этих условий НАПВ допускается применять также в режиме ремонта на параллельных линиях.
При выполнении НАПВ необходимо принять меры по предотвращению излишнего срабатывания защиты. С этой целью рекомендуется, в частности, осуществлять включение выключателей при НАПВ в определенной последовательности, например выполнением АПВ с одной из сторон линии с контролем наличия напряжения на ней после успешного ТАПВ с противоположной стороны.
3.3.13. АПВ с улавливанием синхронизма может применяться на линиях по 3.3.10 для включения линии при значительных (примерно до 4%) скольжениях и допустимом угле.
Возможно также следующее выполнение АПВ. На конце линии, который должен включаться первым, производится ускоренное ТАПВ (с фиксацией срабатывания быстродействующей защиты, зона действия которой охватывает всю линию) без контроля напряжения на линии (УТАПВ БК) или ТАПВ с контролем отсутствия напряжения на линии (ТАПВ ОН), а на другом ее конце - ТАПВ с улавливанием синхронизма. Последнее производится при условии, что включение первого конца было успешным (это может быть определено, например, при помощи контроля наличия напряжения на линии).
Для улавливания синхронизма могут применяться устройства, построенные по принципу синхронизатора с постоянным углом опережения.
Устройства АПВ следует выполнять так, чтобы имелась возможность изменять очередность включения выключателей по концам линии.
При выполнении устройства АПВ УС необходимо стремиться к обеспечению его действия при возможно большей разности частот. Максимальный допустимый угол включения при применении АПВ УС должен приниматься с учетом условий, указанных в 3.3.12. При применении устройства АПВ УС рекомендуется его использование для включения линии персоналом (полуавтоматическая синхронизация).
3.3.14. На линиях, оборудованных трансформаторами напряжения, для контроля отсутствия напряжения (КОН) и контроля наличия напряжения (КНН) на линии при различных видах ТАПВ рекомендуется использовать органы, реагирующие на линейное (фазное) напряжение и на напряжения обратной и нулевой последовательностей. В некоторых случаях, например на линиях без шунтирующих реакторов, можно не использовать напряжение нулевой последовательности.
3.3.15. Однофазное автоматическое повторное включение (ОАПВ) может применяться только в сетях с большим током замыкания на землю. ОАПВ без автоматического перевода линии на длительный неполнофазный режим при устойчивом повреждении фазы следует применять:
а) на одиночных сильно нагруженных межсистемных или внутрисистемных линиях электропередачи;
б) на сильно нагруженных межсистемных линиях 220 кВ и выше с двумя и более обходными связями при условии, что отключение одной из них может привести к нарушению динамической устойчивости энергосистемы;
в) на межсистемных и внутрисистемных линиях разных классов напряжения, если трехфазное отключение линии высшего напряжения может привести к недопустимой перегрузке линий низшего напряжения с возможностью нарушения устойчивости энергосистемы;
г) на линиях, связывающих с системой крупные блочные электростанции без значительной местной нагрузки;
д) на линиях электропередачи, где осуществление ТАПВ сопряжено со значительным сбросом нагрузки вследствие понижения напряжения.
Устройство ОАПВ должно выполняться так, чтобы при выводе его из работы или исчезновении питания автоматически осуществлялся перевод действия защит линии на отключение трех фаз помимо устройства.
Выбор поврежденных фаз при КЗ на землю должен осуществляться при помощи избирательных органов, которые могут быть также использованы в качестве дополнительной быстродействующей защиты линии в цикле ОАПВ, при ТАПВ, БАПВ и одностороннем включении линии оперативным персоналом.
Выдержка временем ОАПВ должна отстраиваться от времени погасания дуги и деионизации среды в месте однофазного КЗ в неполнофазном режиме с учетом возможности неодновременного срабатывания защиты по концам линии, а также каскадного действия избирательных органов.
3.3.16. На линиях по 3.3.15 ОАПВ должно применяться в сочетании с различными видами ТАПВ. При этом должна быть предусмотрена возможность запрета ТАПВ во всех случаях ОАПВ или только при неуспешном ОАПВ. В зависимости от конкретных условий допускается осуществление ТАПВ после неуспешного ОАПВ. В этих случаях предусматривается действие ТАПВ сначала на одном конце линии с контролем отсутствия напряжения на линии и с увеличенной выдержкой времени.
3.3.17. На одиночных линиях с двусторонним питанием, связывающих систему с электростанцией небольшой мощности, могут применяться ТАПВ с автоматической самосинхронизацией (АПВС) гидрогенераторов для гидроэлектростанций и ТАПВ в сочетании с делительными устройствами - для гидро- и теплоэлектростанций.
3.3.18. На линиях с двусторонним питанием при наличии нескольких обходных связей следует применять:
1) при наличии двух связей, а также при наличии трех связей, если вероятно одновременное длительное отключение двух из этих связей (например, двухцепной линии):
несинхронное АПВ (в основном для линий 110-220 кВ и при соблюдении условий, указанных в 3.3.12, но для случая отключения всех связей);
АПВ с проверкой синхронизма (при невозможности выполнения несинхронного АПВ по причинам, указанным в 3.3.12, но для случая отключения всех связей).
Для ответственных линий при наличии двух связей, а также при наличии трех связей, две из которых - двухцепная линия, при невозможности применения НАПВ по причинам, указанным в 3.3.12, разрешается применять устройства ОАПВ, БАПВ или АПВ УС (см. 3.3.11, 3.3.13, 3.3.15). При этом устройства ОАПВ и БАПВ следует дополнять устройством АПВ с проверкой синхронизма;
2) при наличии четырех и более связей, а также при наличии трех связей, если в последнем случае одновременное длительное отключение двух из этих связей маловероятно (например, если все линии одноцепные), - АПВ без проверки синхронизма.
3.3.19. Устройства АПВ с проверкой синхронизма следует выполнять на одном конце линии с контролем отсутствия напряжения на линии и с контролем наличия синхронизма, на другом конце - только с контролем наличия синхронизма. Схемы устройства АПВ с проверкой синхронизма линии должны выполняться одинаковыми на обоих концах с учетом возможности изменения очередности включения выключателей линии при АПВ.
Рекомендуется использовать устройство АПВ с проверкой синхронизма для проверки синхронизма соединяемых систем при включении линии персоналом.
3.3.20. Допускается совместное применение нескольких видов трехфазного АПВ на линии, например БАПВ и ТАПВ с проверкой синхронизма. Допускается также использовать различные виды устройств АПВ на разных концах линии, например УТАПВ БК (см. 3.3.13) на одном конце линии и ТАПВ с контролем наличия напряжения и синхронизма на другом.
3.3.21. Допускается сочетание ТАПВ с неселективными быстродействующими защитами для исправления неселективного действия последних. В сетях, состоящих из ряда последовательно включенных линий, при применении для них неселективных быстродействующих защит для исправления их действия рекомендуется применять поочередное АПВ; могут также применяться устройства АПВ с ускорением защиты до АПВ или с кратностью действия (не более трех), возрастающей по направлению к источнику питания.
3.3.22. При применении трехфазного однократного АПВ линий, питающих трансформаторы, со стороны высшего напряжения которых устанавливаются короткозамыкатели и отделители, для отключения отделителя в бестоковую паузу время действия устройства АПВ должно быть отстроено от суммарного времени включения короткозамыкателя и отключения отделителя. При применении трехфазного АПВ двукратного действия (см. 3.3.6) время действия АПВ в первом цикле по указанному условию не должно увеличиваться, если отключение отделителя предусматривается в бестоковую паузу второго цикла АПВ.
Для линий, на которые вместо выключателей устанавливаются отделители, отключение отделителей в случае неуспешного АПВ в первом цикле должно производиться в бестоковую паузу второго цикла АПВ.
3.3.23. Если в результате действия АПВ возможно несинхронное включение синхронных компенсаторов или синхронных электродвигателей и если такое включение для них недопустимо, а также для исключения подпитки от этих машин места повреждения следует предусматривать автоматическое отключение этих синхронных машин при исчезновении питания или переводить их в асинхронный режим отключением АГП с последующим автоматическим включением или ресинхронизацией после восстановления напряжения в результате успешного АПВ.
Для подстанций с синхронными компенсаторами или синхронными электродвигателями должны применяться меры, предотвращающие излишние срабатывания АЧР при действии АПВ.
3.3.24. АПВ шин электростанций и подстанций при наличии специальной защиты шин и выключателей, допускающих АПВ, должно выполняться по одному из двух вариантов:
1) автоматическим опробованием (постановка шин под напряжение выключателем от АПВ одного из питающих элементов);
2) автоматической сборкой схемы; при этом первым от устройства АПВ включается один из питающих элементов (например, линия, трансформатор), при успешном включении этого элемента производится последующее, возможно более полное автоматическое восстановление схемы доаварийного режима путем включения других элементов. АПВ шин по этому варианту рекомендуется применять в первую очередь для подстанций без постоянного дежурства персонала.
При выполнении АПВ шин должны применяться меры, исключающие несинхронное включение (если оно является недопустимым).
Должна обеспечиваться достаточная чувствительность защиты шин на случай неуспешного АПВ.
3.3.25. На двухтрансформаторных понижающих подстанциях при раздельной работе трансформаторов, как правило, должны предусматриваться устройства АПВ шин среднего и низшего напряжений в сочетании с устройствами АВР; при внутренних повреждениях трансформаторов должно действовать АВР, при прочих повреждениях - АПВ (см. 3.3.42).
Допускается для двухтрансформаторной подстанции, в нормальном режиме которой предусматривается параллельная работа трансформаторов на шинах данного напряжения, устанавливать дополнительно к устройству АПВ устройство АВР, предназначенное для режима, когда один из трансформаторов выведен в резерв.
3.3.26. Устройствами АПВ должны быть оборудованы все одиночные понижающие трансформаторы мощностью более 1 MB·А на подстанциях энергосистем, имеющие выключатель и максимальную токовую защиту с питающей стороны, когда отключение трансформатора приводит к обесточению электроустановок потребителей. Допускается в отдельных случаях действие АПВ и при отключении трансформатора защитой от внутренних повреждений.
3.3.27. При неуспешном АПВ включаемого первым выключателем элемента, присоединенного двумя или более выключателями, АПВ остальных выключателей этого элемента, как правило, должно запрещаться.
3.3.28. При наличии на подстанции или электростанции выключателей с электромагнитным приводом, если от устройства АПВ могут быть одновременно включены два или более выключателей, для обеспечения необходимого уровня напряжения аккумуляторной батареи при включении и для снижения сечения кабелей цепей питания электромагнитов включения следует, как правило, выполнять АПВ так, чтобы одновременное включение нескольких выключателей было исключено (например, применением на присоединениях АПВ с различными выдержками времени).
Допускается в отдельных случаях (преимущественно при напряжении 110 кВ и большом числе присоединений, оборудованных АПВ) одновременное включение от АПВ двух выключателей.
3.3.29. Действие устройств АПВ должно фиксироваться указательными реле, встроенными в реле указателями срабатывания, счетчиками числа срабатываний или другими устройствами аналогичного назначения.
[ ПУЭ]Тематики
- высоковольтный аппарат, оборудование...
- релейная защита
- электроснабжение в целом
Обобщающие термины
Синонимы
Сопутствующие термины
- АПВ воздушных линий
- АПВ смешанных (кабельно-воздушных) линий
- двукратное АПВ
- неуспешное АПВ
- однократное АПВ
- трехкратное АПВ
- цикл АПВ
EN
- AR
- ARC
- auto-reclosing
- automatic reclosing
- automatic recluse
- autoreclosing
- autoreclosure
- reclose
- reclosing
- reclosure
DE
- automatische Wiedereinschaltung
- Kurzunterbrechung
- selbsttätiges Wiederschließen (eines mechanischen Schaltgerätes)
- Wiedereinschaltung, automatische
FR
Русско-немецкий словарь нормативно-технической терминологии > автоматическое повторное включение
-
9 автоматическое повторное включение
- reclosure
- reclosing
- reclose
- autoreclosure
- autoreclosing
- automatic recluse
- automatic reclosing
- auto-reclosing
- ARC
- AR
автоматическое повторное включение
АПВ
Коммутационный цикл, при котором выключатель вслед за его отключением автоматически включается через установленный промежуток времени (О - tбт - В).
[ ГОСТ Р 52565-2006]
автоматическое повторное включение
АПВ
Автоматическое включение аварийно отключившегося элемента электрической сети
[ОАО РАО "ЕЭС России" СТО 17330282.27.010.001-2008]
(автоматическое) повторное включение
АПВ
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва]EN
automatic reclosing
automatic reclosing of a circuit-breaker associated with a faulted section of a network after an interval of time which permits that section to recover from a transient fault
[IEC 61936-1, ed. 1.0 (2002-10)]
[IEV 604-02-32]
auto-reclosing
the operating sequence of a mechanical switching device whereby, following its opening, it closes automatically after a predetermined time
[IEC 62271-100, ed. 2.0 (2008-04)]
auto-reclosing (of a mechanical switching device)
the operating sequence of a mechanical switching device whereby, following its opening, it closes automatically after a predetermined time
[IEV number 441-16-10]FR
réenclenchement automatique
refermeture du disjoncteur associé à une fraction de réseau affectée d'un défaut, par un dispositif automatique après un intervalle de temps permettant la disparition d'un défaut fugitif
[IEC 61936-1, ed. 1.0 (2002-10)]
[IEV 604-02-32]
refermeture automatique
séquence de manoeuvres par laquelle, à la suite d’une ouverture, un appareil mécanique de connexion est refermé automatiquement après un intervalle de temps prédéterminé
[IEC 62271-100, ed. 2.0 (2008-04)]
refermeture automatique (d'un appareil mécanique de connexion)
séquence de manoeuvres par laquelle, à la suite d'une ouverture, un appareil mécanique de connexion est refermé automatiquement après un intervalle de temps prédéterminé
[IEV number 441-16-10]
Автоматическое повторное включение (АПВ), быстрое автоматическое обратное включение в работу высоковольтных линий электропередачи и электрооборудования высокого напряжения после их автоматического отключения; одно из наиболее эффективных средств противоаварийной автоматики. Повышает надёжность электроснабжения потребителей и восстанавливает нормальный режим работы электрической системы. Во многих случаях после быстрого отключения участка электрической системы, на котором возникло короткое замыкание в результате кратковременного нарушения изоляции или пробоя воздушного промежутка, при последующей подаче напряжения повторное короткое замыкание не возникает. АПВ выполняется с помощью автоматических устройств, воздействующих на высоковольтные выключатели после их аварийного автоматического отключения от релейной защиты. Многие из этих автоматических устройств обеспечивают АПВ при самопроизвольном отключении выключателей, например при сильных сотрясениях почвы во время близких взрывов, землетрясениях и т. п. Эффективность АПВ тем выше, чем быстрее следует оно за аварийным отключением, т. е. чем меньше время перерыва питания потребителей. Это время зависит от длительности цикла АПВ. В электрических системах применяют однократное АПВ — с одним циклом, двукратное — при неуспешном первом цикле, и трёхкратное — с тремя последовательными циклами. Цикл АПВ — время от момента подачи сигнала на отключение до замыкания цепи главными контактами выключателя — состоит из времени отключения и включения выключателя и времени срабатывания устройства АПВ. Длительность бестоковой паузы, когда потребитель не получает электроэнергию, выбирается такой, чтобы успело произойти восстановление изоляции (деионизация среды) в месте короткого замыкания, привод выключателя после отключения был бы готов к повторному включению, а выключатель к моменту замыкания его главных контактов восстановил способность к отключению поврежденной цепи в случае неуспешного АПВ. Время деионизации зависит от среды, климатических условий и других факторов. Время восстановления отключающей способности выключателя определяется его конструкцией и количеством циклов АПВ., предшествовавших данному. Обычно длительность 1-го цикла не превышает 0,5—1,5 сек, 2-го — от 10 до 15 сек, 3-го — от 60 до 120 сек.
Наиболее распространено однократное АПВ, обеспечивающее на воздушных линиях высокого напряжения (110 кв и выше) до 86 %, а на кабельных линиях (3—10 кв) — до 55 % успешных включений. Двукратное АПВ обеспечивает во втором цикле до 15 % успешных включений. Третий цикл увеличивает число успешных включений всего на 3—5 %. На линиях электропередачи высокого напряжения (от 110 до 500 кВ) применяется однофазовое АПВ; при этом выключатели должны иметь отдельные приводы на каждой фазе.
Применение АПВ экономически выгодно, т. к. стоимость устройств АПВ и их эксплуатации несравнимо меньше ущерба из-за перерыва в подаче электроэнергии.
[ БСЭ]
НАЗНАЧЕНИЕ И ОБЛАСТЬ ПРИМЕНЕНИЯ АПВ
Опыт эксплуатации сетей высокого напряжения показал, что если поврежденную линию электропередачи быстро отключить, т. е. снять с нее напряжение, то в большинстве случаев повреждение ликвидируется. При этом электрическая дуга, возникавшая в месте короткого замыкания (КЗ), не успевает вызвать существенных разрушений оборудования, препятствующих обратному включению линии под напряжение.
Самоустраняющиеся повреждения принято называть неустойчивыми. Такие повреждения возникают в результате грозовых перекрытий изоляции, схлестывания проводов при ветре и сбрасывании гололеда, падения деревьев, задевания проводов движущимися механизмами.
Данные о повреждаемости воздушных линий электропередачи (ВЛ) за многолетний период эксплуатации показывают, что доля неустойчивых повреждений весьма высока и составляет 50—90 %.
При ликвидации аварии оперативный персонал производит обычно опробование линии путем включения ее под напряжение, так как отыскание места повреждения на линии электропередачи путем ее обхода требует длительного времени, а многие повреждения носят неустойчивый характер. Эту операцию называют повторным включением.
Если КЗ самоустранилось, то линия, на которой произошло неустойчивое повреждение, при повторном включении остается в работе. Поэтому повторные включения при неустойчивых повреждениях принято называть успешными.
На ВЛ успешность повторного включения сильно зависит от номинального напряжения линий. На линиях ПО кВ и выше успешность повторного включения значительно выше, чем на ВЛ 6—35 кВ. Высокий процент успешных повторных включений в сетях высокого и сверхвысокого напряжения объясняется быстродействием релейной защиты (как правило, не более 0,1-0,15 с), большим сечением проводов и расстояний между ними, высокой механической прочностью опор. [Овчинников В. В., Автоматическое повторное включение. — М.:Энергоатомиздат, 1986.— 96 с: ил. — (Б-ка электромонтера; Вып. 587). Энергоатомиздат, 1986]
АВТОМАТИЧЕСКОЕ ПОВТОРНОЕ ВКЛЮЧЕНИЕ (АПВ)
3.3.2. Устройства АПВ должны предусматриваться для быстрого восстановления питания потребителей или межсистемных и внутрисистемных связей путем автоматического включения выключателей, отключенных устройствами релейной защиты.
Должно предусматриваться автоматическое повторное включение:
1) воздушных и смешанных (кабельно-воздушных) линий всех типов напряжением выше 1 кВ. Отказ от применения АПВ должен быть в каждом отдельном случае обоснован. На кабельных линиях 35 кВ и ниже АПВ рекомендуется применять в случаях, когда оно может быть эффективным в связи со значительной вероятностью повреждений с образованием открытой дуги (например, наличие нескольких промежуточных сборок, питание по одной линии нескольких подстанций), а также с целью исправления неселективного действия защиты. Вопрос о применении АПВ на кабельных линиях 110 кВ и выше должен решаться при проектировании в каждом отдельном случае с учетом конкретных условий;
2) шин электростанций и подстанций (см. 3.3.24 и 3.3.25);
3) трансформаторов (см. 3.3.26);
4) ответственных электродвигателей, отключаемых для обеспечения самозапуска других электродвигателей (см. 3.3.38).
Для осуществления АПВ по п. 1-3 должны также предусматриваться устройства АПВ на обходных, шиносоединительных и секционных выключателях.
Допускается в целях экономии аппаратуры выполнение устройства группового АПВ на линиях, в первую очередь кабельных, и других присоединениях 6-10 кВ. При этом следует учитывать недостатки устройства группового АПВ, например возможность отказа в случае, если после отключения выключателя одного из присоединений отключение выключателя другого присоединения происходит до возврата устройства АПВ в исходное положение.
3.3.3. Устройства АПВ должны быть выполнены так, чтобы они не действовали при:
1) отключении выключателя персоналом дистанционно или при помощи телеуправления;
2) автоматическом отключении от релейной защиты непосредственно после включения персоналом дистанционно или при помощи телеуправления;
3) отключении выключателя защитой от внутренних повреждений трансформаторов и вращающихся машин, устройствами противоаварийной автоматики, а также в других случаях отключений выключателя, когда действие АПВ недопустимо. АПВ после действия АЧР (ЧАПВ) должно выполняться в соответствии с 3.3.81.
Устройства АПВ должны быть выполнены так, чтобы была исключена возможностью многократного включения на КЗ при любой неисправности в схеме устройства.
Устройства АПВ должны выполняться с автоматическим возвратом.
3.3.4. При применении АПВ должно, как правило, предусматриваться ускорение действия релейной защиты на случай неуспешного АПВ. Ускорение действия релейной защиты после неуспешного АПВ выполняется с помощью устройства ускорения после включения выключателя, которое, как правило, должно использоваться и при включении выключателя по другим причинам (от ключа управления, телеуправления или устройства АВР). При ускорении защиты после включения выключателя должны быть приняты меры против возможного отключения выключателя защитой под действием толчка тока при включении из-за неодновременного включения фаз выключателя.
Не следует ускорять защиты после включения выключателя, когда линия уже включена под напряжение другим своим выключателем (т. е. при наличии симметричного напряжения на линии).
Допускается не ускорять после АПВ действие защит линий 35 кВ и ниже, выполненных на переменном оперативном токе, если для этого требуется значительное усложнение защит и время их действия при металлическом КЗ вблизи места установки не превосходит 1,5 с.
3.3.5. Устройства трехфазного АПВ (ТАПВ) должны осуществляться преимущественно с пуском при несоответствии между ранее поданной оперативной командой и отключенным положением выключателя; допускается также пуск устройства АПВ от защиты.
3.3.6. Могут применяться, как правило, устройства ТАПВ однократного или двукратного действия (последнее - если это допустимо по условиям работы выключателя). Устройство ТАПВ двукратного действия рекомендуется принимать для воздушных линий, в особенности для одиночных с односторонним питанием. В сетях 35 кВ и ниже устройства ТАПВ двукратного действия рекомендуется применять в первую очередь для линий, не имеющих резервирования по сети.
В сетях с изолированной или компенсированной нейтралью, как правило, должна применяться блокировка второго цикла АПВ в случае замыкания на землю после АПВ первого цикла (например, по наличию напряжений нулевой последовательности). Выдержка времени ТАПВ во втором цикле должна быть не менее 15-20 с.
3.3.7. Для ускорения восстановления нормального режима работы электропередачи выдержка времени устройства ТАПВ (в особенности для первого цикла АПВ двукратного действия на линиях с односторонним питанием) должна приниматься минимально возможной с учетом времени погасания дуги и деионизации среды в месте повреждения, а также с учетом времени готовности выключателя и его привода к повторному включению.
Выдержка времени устройства ТАПВ на линии с двусторонним питанием должна выбираться также с учетом возможного неодновременного отключения повреждения с обоих концов линии; при этом время действия защит, предназначенных для дальнего резервирования, учитываться не должно. Допускается не учитывать разновременности отключения выключателей по концам линии, когда они отключаются в результате срабатывания высокочастотной защиты.
С целью повышения эффективности ТАПВ однократного действия допускается увеличивать его выдержку времени (по возможности с учетом работы потребителя).
3.3.8. На одиночных линиях 110 кВ и выше с односторонним питанием, для которых допустим в случае неуспешного ТАПВ переход на длительную работу двумя фазами, следует предусматривать ТАПВ двукратного действия на питающем конце линии. Перевод линии на работу двумя фазами может производиться персоналом на месте или при помощи телеуправления.
Для перевода линии после неуспешного АПВ на работу двумя фазами следует предусматривать пофазное управление разъединителями или выключателями на питающем и приемном концах линии.
При переводе линии на длительную работу двумя фазами следует при необходимости принимать меры к уменьшению помех в работе линий связи из-за неполнофазного режима работы линии. С этой целью допускается ограничение мощности, передаваемой по линии в неполнофазном режиме (если это возможно по условиям работы потребителя).
В отдельных случаях при наличии специального обоснования допускается также перерыв в работе линии связи на время неполнофазного режима.
3.3.9. На линиях, отключение которых не приводит к нарушению электрической связи между генерирующими источниками, например на параллельных линиях с односторонним питанием, следует устанавливать устройства ТАПВ без проверки синхронизма.
3.3.10. На одиночных линиях с двусторонним питанием (при отсутствии шунтирующих связей) должен предусматриваться один из следующих видов трехфазного АПВ (или их комбинаций):
а) быстродействующее ТАПВ (БАПВ)
б) несинхронное ТАПВ (НАПВ);
в) ТАПВ с улавливанием синхронизма (ТАПВ УС).
Кроме того, может предусматриваться однофазное АПВ (ОАПВ) в сочетании с различными видами ТАПВ, если выключатели оборудованы пофазным управлением и не нарушается устойчивость параллельной работы частей энергосистемы в цикле ОАПВ.
Выбор видов АПВ производится, исходя из совокупности конкретных условий работы системы и оборудования с учетом указаний 3.3.11-3.3.15.
3.3.11. Быстродействующее АПВ, или БАПВ (одновременное включение с минимальной выдержкой времени с обоих концов), рекомендуется предусматривать на линиях по 3.3.10 для автоматического повторного включения, как правило, при небольшом расхождении угла между векторами ЭДС соединяемых систем. БАПВ может применяться при наличии выключателей, допускающих БАПВ, если после включения обеспечивается сохранение синхронной параллельной работы систем и максимальный электромагнитный момент синхронных генераторов и компенсаторов меньше (с учетом необходимого запаса) электромагнитного момента, возникающего при трехфазном КЗ на выводах машины.
Оценка максимального электромагнитного момента должна производиться для предельно возможного расхождения угла за время БАПВ. Соответственно запуск БАПВ должен производиться лишь при срабатывании быстродействующей защиты, зона действия которой охватывает всю линию. БАПВ должно блокироваться при срабатывании резервных защит и блокироваться или задерживаться при работе УРОВ.
Если для сохранения устойчивости энергосистемы при неуспешном БАПВ требуется большой объем воздействий от противоаварийной автоматики, применение БАПВ не рекомендуется.
3.3.12. Несинхронное АПВ (НАПВ) может применяться на линиях по 3.3.10 (в основном 110-220 кВ), если:
а) максимальный электромагнитный момент синхронных генераторов и компенсаторов, возникающий при несинхронном включении, меньше (с учетом необходимого запаса) электромагнитного момента, возникающего при трехфазном КЗ на выводах машины, при этом в качестве практических критериев оценки допустимости НАПВ принимаются расчетные начальные значения периодических составляющих токов статора при угле включения 180°;
б) максимальный ток через трансформатор (автотрансформатор) при угле включения 180° меньше тока КЗ на его выводах при питании от шин бесконечной мощности;
в) после АПВ обеспечивается достаточно быстрая ресинхронизация; если в результате несинхронного автоматического повторного включения возможно возникновение длительного асинхронного хода, должны применяться специальные мероприятия для его предотвращения или прекращения.
При соблюдении этих условий НАПВ допускается применять также в режиме ремонта на параллельных линиях.
При выполнении НАПВ необходимо принять меры по предотвращению излишнего срабатывания защиты. С этой целью рекомендуется, в частности, осуществлять включение выключателей при НАПВ в определенной последовательности, например выполнением АПВ с одной из сторон линии с контролем наличия напряжения на ней после успешного ТАПВ с противоположной стороны.
3.3.13. АПВ с улавливанием синхронизма может применяться на линиях по 3.3.10 для включения линии при значительных (примерно до 4%) скольжениях и допустимом угле.
Возможно также следующее выполнение АПВ. На конце линии, который должен включаться первым, производится ускоренное ТАПВ (с фиксацией срабатывания быстродействующей защиты, зона действия которой охватывает всю линию) без контроля напряжения на линии (УТАПВ БК) или ТАПВ с контролем отсутствия напряжения на линии (ТАПВ ОН), а на другом ее конце - ТАПВ с улавливанием синхронизма. Последнее производится при условии, что включение первого конца было успешным (это может быть определено, например, при помощи контроля наличия напряжения на линии).
Для улавливания синхронизма могут применяться устройства, построенные по принципу синхронизатора с постоянным углом опережения.
Устройства АПВ следует выполнять так, чтобы имелась возможность изменять очередность включения выключателей по концам линии.
При выполнении устройства АПВ УС необходимо стремиться к обеспечению его действия при возможно большей разности частот. Максимальный допустимый угол включения при применении АПВ УС должен приниматься с учетом условий, указанных в 3.3.12. При применении устройства АПВ УС рекомендуется его использование для включения линии персоналом (полуавтоматическая синхронизация).
3.3.14. На линиях, оборудованных трансформаторами напряжения, для контроля отсутствия напряжения (КОН) и контроля наличия напряжения (КНН) на линии при различных видах ТАПВ рекомендуется использовать органы, реагирующие на линейное (фазное) напряжение и на напряжения обратной и нулевой последовательностей. В некоторых случаях, например на линиях без шунтирующих реакторов, можно не использовать напряжение нулевой последовательности.
3.3.15. Однофазное автоматическое повторное включение (ОАПВ) может применяться только в сетях с большим током замыкания на землю. ОАПВ без автоматического перевода линии на длительный неполнофазный режим при устойчивом повреждении фазы следует применять:
а) на одиночных сильно нагруженных межсистемных или внутрисистемных линиях электропередачи;
б) на сильно нагруженных межсистемных линиях 220 кВ и выше с двумя и более обходными связями при условии, что отключение одной из них может привести к нарушению динамической устойчивости энергосистемы;
в) на межсистемных и внутрисистемных линиях разных классов напряжения, если трехфазное отключение линии высшего напряжения может привести к недопустимой перегрузке линий низшего напряжения с возможностью нарушения устойчивости энергосистемы;
г) на линиях, связывающих с системой крупные блочные электростанции без значительной местной нагрузки;
д) на линиях электропередачи, где осуществление ТАПВ сопряжено со значительным сбросом нагрузки вследствие понижения напряжения.
Устройство ОАПВ должно выполняться так, чтобы при выводе его из работы или исчезновении питания автоматически осуществлялся перевод действия защит линии на отключение трех фаз помимо устройства.
Выбор поврежденных фаз при КЗ на землю должен осуществляться при помощи избирательных органов, которые могут быть также использованы в качестве дополнительной быстродействующей защиты линии в цикле ОАПВ, при ТАПВ, БАПВ и одностороннем включении линии оперативным персоналом.
Выдержка временем ОАПВ должна отстраиваться от времени погасания дуги и деионизации среды в месте однофазного КЗ в неполнофазном режиме с учетом возможности неодновременного срабатывания защиты по концам линии, а также каскадного действия избирательных органов.
3.3.16. На линиях по 3.3.15 ОАПВ должно применяться в сочетании с различными видами ТАПВ. При этом должна быть предусмотрена возможность запрета ТАПВ во всех случаях ОАПВ или только при неуспешном ОАПВ. В зависимости от конкретных условий допускается осуществление ТАПВ после неуспешного ОАПВ. В этих случаях предусматривается действие ТАПВ сначала на одном конце линии с контролем отсутствия напряжения на линии и с увеличенной выдержкой времени.
3.3.17. На одиночных линиях с двусторонним питанием, связывающих систему с электростанцией небольшой мощности, могут применяться ТАПВ с автоматической самосинхронизацией (АПВС) гидрогенераторов для гидроэлектростанций и ТАПВ в сочетании с делительными устройствами - для гидро- и теплоэлектростанций.
3.3.18. На линиях с двусторонним питанием при наличии нескольких обходных связей следует применять:
1) при наличии двух связей, а также при наличии трех связей, если вероятно одновременное длительное отключение двух из этих связей (например, двухцепной линии):
несинхронное АПВ (в основном для линий 110-220 кВ и при соблюдении условий, указанных в 3.3.12, но для случая отключения всех связей);
АПВ с проверкой синхронизма (при невозможности выполнения несинхронного АПВ по причинам, указанным в 3.3.12, но для случая отключения всех связей).
Для ответственных линий при наличии двух связей, а также при наличии трех связей, две из которых - двухцепная линия, при невозможности применения НАПВ по причинам, указанным в 3.3.12, разрешается применять устройства ОАПВ, БАПВ или АПВ УС (см. 3.3.11, 3.3.13, 3.3.15). При этом устройства ОАПВ и БАПВ следует дополнять устройством АПВ с проверкой синхронизма;
2) при наличии четырех и более связей, а также при наличии трех связей, если в последнем случае одновременное длительное отключение двух из этих связей маловероятно (например, если все линии одноцепные), - АПВ без проверки синхронизма.
3.3.19. Устройства АПВ с проверкой синхронизма следует выполнять на одном конце линии с контролем отсутствия напряжения на линии и с контролем наличия синхронизма, на другом конце - только с контролем наличия синхронизма. Схемы устройства АПВ с проверкой синхронизма линии должны выполняться одинаковыми на обоих концах с учетом возможности изменения очередности включения выключателей линии при АПВ.
Рекомендуется использовать устройство АПВ с проверкой синхронизма для проверки синхронизма соединяемых систем при включении линии персоналом.
3.3.20. Допускается совместное применение нескольких видов трехфазного АПВ на линии, например БАПВ и ТАПВ с проверкой синхронизма. Допускается также использовать различные виды устройств АПВ на разных концах линии, например УТАПВ БК (см. 3.3.13) на одном конце линии и ТАПВ с контролем наличия напряжения и синхронизма на другом.
3.3.21. Допускается сочетание ТАПВ с неселективными быстродействующими защитами для исправления неселективного действия последних. В сетях, состоящих из ряда последовательно включенных линий, при применении для них неселективных быстродействующих защит для исправления их действия рекомендуется применять поочередное АПВ; могут также применяться устройства АПВ с ускорением защиты до АПВ или с кратностью действия (не более трех), возрастающей по направлению к источнику питания.
3.3.22. При применении трехфазного однократного АПВ линий, питающих трансформаторы, со стороны высшего напряжения которых устанавливаются короткозамыкатели и отделители, для отключения отделителя в бестоковую паузу время действия устройства АПВ должно быть отстроено от суммарного времени включения короткозамыкателя и отключения отделителя. При применении трехфазного АПВ двукратного действия (см. 3.3.6) время действия АПВ в первом цикле по указанному условию не должно увеличиваться, если отключение отделителя предусматривается в бестоковую паузу второго цикла АПВ.
Для линий, на которые вместо выключателей устанавливаются отделители, отключение отделителей в случае неуспешного АПВ в первом цикле должно производиться в бестоковую паузу второго цикла АПВ.
3.3.23. Если в результате действия АПВ возможно несинхронное включение синхронных компенсаторов или синхронных электродвигателей и если такое включение для них недопустимо, а также для исключения подпитки от этих машин места повреждения следует предусматривать автоматическое отключение этих синхронных машин при исчезновении питания или переводить их в асинхронный режим отключением АГП с последующим автоматическим включением или ресинхронизацией после восстановления напряжения в результате успешного АПВ.
Для подстанций с синхронными компенсаторами или синхронными электродвигателями должны применяться меры, предотвращающие излишние срабатывания АЧР при действии АПВ.
3.3.24. АПВ шин электростанций и подстанций при наличии специальной защиты шин и выключателей, допускающих АПВ, должно выполняться по одному из двух вариантов:
1) автоматическим опробованием (постановка шин под напряжение выключателем от АПВ одного из питающих элементов);
2) автоматической сборкой схемы; при этом первым от устройства АПВ включается один из питающих элементов (например, линия, трансформатор), при успешном включении этого элемента производится последующее, возможно более полное автоматическое восстановление схемы доаварийного режима путем включения других элементов. АПВ шин по этому варианту рекомендуется применять в первую очередь для подстанций без постоянного дежурства персонала.
При выполнении АПВ шин должны применяться меры, исключающие несинхронное включение (если оно является недопустимым).
Должна обеспечиваться достаточная чувствительность защиты шин на случай неуспешного АПВ.
3.3.25. На двухтрансформаторных понижающих подстанциях при раздельной работе трансформаторов, как правило, должны предусматриваться устройства АПВ шин среднего и низшего напряжений в сочетании с устройствами АВР; при внутренних повреждениях трансформаторов должно действовать АВР, при прочих повреждениях - АПВ (см. 3.3.42).
Допускается для двухтрансформаторной подстанции, в нормальном режиме которой предусматривается параллельная работа трансформаторов на шинах данного напряжения, устанавливать дополнительно к устройству АПВ устройство АВР, предназначенное для режима, когда один из трансформаторов выведен в резерв.
3.3.26. Устройствами АПВ должны быть оборудованы все одиночные понижающие трансформаторы мощностью более 1 MB·А на подстанциях энергосистем, имеющие выключатель и максимальную токовую защиту с питающей стороны, когда отключение трансформатора приводит к обесточению электроустановок потребителей. Допускается в отдельных случаях действие АПВ и при отключении трансформатора защитой от внутренних повреждений.
3.3.27. При неуспешном АПВ включаемого первым выключателем элемента, присоединенного двумя или более выключателями, АПВ остальных выключателей этого элемента, как правило, должно запрещаться.
3.3.28. При наличии на подстанции или электростанции выключателей с электромагнитным приводом, если от устройства АПВ могут быть одновременно включены два или более выключателей, для обеспечения необходимого уровня напряжения аккумуляторной батареи при включении и для снижения сечения кабелей цепей питания электромагнитов включения следует, как правило, выполнять АПВ так, чтобы одновременное включение нескольких выключателей было исключено (например, применением на присоединениях АПВ с различными выдержками времени).
Допускается в отдельных случаях (преимущественно при напряжении 110 кВ и большом числе присоединений, оборудованных АПВ) одновременное включение от АПВ двух выключателей.
3.3.29. Действие устройств АПВ должно фиксироваться указательными реле, встроенными в реле указателями срабатывания, счетчиками числа срабатываний или другими устройствами аналогичного назначения.
[ ПУЭ]Тематики
- высоковольтный аппарат, оборудование...
- релейная защита
- электроснабжение в целом
Обобщающие термины
Синонимы
Сопутствующие термины
- АПВ воздушных линий
- АПВ смешанных (кабельно-воздушных) линий
- двукратное АПВ
- неуспешное АПВ
- однократное АПВ
- трехкратное АПВ
- цикл АПВ
EN
- AR
- ARC
- auto-reclosing
- automatic reclosing
- automatic recluse
- autoreclosing
- autoreclosure
- reclose
- reclosing
- reclosure
DE
- automatische Wiedereinschaltung
- Kurzunterbrechung
- selbsttätiges Wiederschließen (eines mechanischen Schaltgerätes)
- Wiedereinschaltung, automatische
FR
Русско-английский словарь нормативно-технической терминологии > автоматическое повторное включение
-
10 автоматическое повторное включение
автоматическое повторное включение
АПВ
Коммутационный цикл, при котором выключатель вслед за его отключением автоматически включается через установленный промежуток времени (О - tбт - В).
[ ГОСТ Р 52565-2006]
автоматическое повторное включение
АПВ
Автоматическое включение аварийно отключившегося элемента электрической сети
[ОАО РАО "ЕЭС России" СТО 17330282.27.010.001-2008]
(автоматическое) повторное включение
АПВ
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва]EN
automatic reclosing
automatic reclosing of a circuit-breaker associated with a faulted section of a network after an interval of time which permits that section to recover from a transient fault
[IEC 61936-1, ed. 1.0 (2002-10)]
[IEV 604-02-32]
auto-reclosing
the operating sequence of a mechanical switching device whereby, following its opening, it closes automatically after a predetermined time
[IEC 62271-100, ed. 2.0 (2008-04)]
auto-reclosing (of a mechanical switching device)
the operating sequence of a mechanical switching device whereby, following its opening, it closes automatically after a predetermined time
[IEV number 441-16-10]FR
réenclenchement automatique
refermeture du disjoncteur associé à une fraction de réseau affectée d'un défaut, par un dispositif automatique après un intervalle de temps permettant la disparition d'un défaut fugitif
[IEC 61936-1, ed. 1.0 (2002-10)]
[IEV 604-02-32]
refermeture automatique
séquence de manoeuvres par laquelle, à la suite d’une ouverture, un appareil mécanique de connexion est refermé automatiquement après un intervalle de temps prédéterminé
[IEC 62271-100, ed. 2.0 (2008-04)]
refermeture automatique (d'un appareil mécanique de connexion)
séquence de manoeuvres par laquelle, à la suite d'une ouverture, un appareil mécanique de connexion est refermé automatiquement après un intervalle de temps prédéterminé
[IEV number 441-16-10]
Автоматическое повторное включение (АПВ), быстрое автоматическое обратное включение в работу высоковольтных линий электропередачи и электрооборудования высокого напряжения после их автоматического отключения; одно из наиболее эффективных средств противоаварийной автоматики. Повышает надёжность электроснабжения потребителей и восстанавливает нормальный режим работы электрической системы. Во многих случаях после быстрого отключения участка электрической системы, на котором возникло короткое замыкание в результате кратковременного нарушения изоляции или пробоя воздушного промежутка, при последующей подаче напряжения повторное короткое замыкание не возникает. АПВ выполняется с помощью автоматических устройств, воздействующих на высоковольтные выключатели после их аварийного автоматического отключения от релейной защиты. Многие из этих автоматических устройств обеспечивают АПВ при самопроизвольном отключении выключателей, например при сильных сотрясениях почвы во время близких взрывов, землетрясениях и т. п. Эффективность АПВ тем выше, чем быстрее следует оно за аварийным отключением, т. е. чем меньше время перерыва питания потребителей. Это время зависит от длительности цикла АПВ. В электрических системах применяют однократное АПВ — с одним циклом, двукратное — при неуспешном первом цикле, и трёхкратное — с тремя последовательными циклами. Цикл АПВ — время от момента подачи сигнала на отключение до замыкания цепи главными контактами выключателя — состоит из времени отключения и включения выключателя и времени срабатывания устройства АПВ. Длительность бестоковой паузы, когда потребитель не получает электроэнергию, выбирается такой, чтобы успело произойти восстановление изоляции (деионизация среды) в месте короткого замыкания, привод выключателя после отключения был бы готов к повторному включению, а выключатель к моменту замыкания его главных контактов восстановил способность к отключению поврежденной цепи в случае неуспешного АПВ. Время деионизации зависит от среды, климатических условий и других факторов. Время восстановления отключающей способности выключателя определяется его конструкцией и количеством циклов АПВ., предшествовавших данному. Обычно длительность 1-го цикла не превышает 0,5—1,5 сек, 2-го — от 10 до 15 сек, 3-го — от 60 до 120 сек.
Наиболее распространено однократное АПВ, обеспечивающее на воздушных линиях высокого напряжения (110 кв и выше) до 86 %, а на кабельных линиях (3—10 кв) — до 55 % успешных включений. Двукратное АПВ обеспечивает во втором цикле до 15 % успешных включений. Третий цикл увеличивает число успешных включений всего на 3—5 %. На линиях электропередачи высокого напряжения (от 110 до 500 кВ) применяется однофазовое АПВ; при этом выключатели должны иметь отдельные приводы на каждой фазе.
Применение АПВ экономически выгодно, т. к. стоимость устройств АПВ и их эксплуатации несравнимо меньше ущерба из-за перерыва в подаче электроэнергии.
[ БСЭ]
НАЗНАЧЕНИЕ И ОБЛАСТЬ ПРИМЕНЕНИЯ АПВ
Опыт эксплуатации сетей высокого напряжения показал, что если поврежденную линию электропередачи быстро отключить, т. е. снять с нее напряжение, то в большинстве случаев повреждение ликвидируется. При этом электрическая дуга, возникавшая в месте короткого замыкания (КЗ), не успевает вызвать существенных разрушений оборудования, препятствующих обратному включению линии под напряжение.
Самоустраняющиеся повреждения принято называть неустойчивыми. Такие повреждения возникают в результате грозовых перекрытий изоляции, схлестывания проводов при ветре и сбрасывании гололеда, падения деревьев, задевания проводов движущимися механизмами.
Данные о повреждаемости воздушных линий электропередачи (ВЛ) за многолетний период эксплуатации показывают, что доля неустойчивых повреждений весьма высока и составляет 50—90 %.
При ликвидации аварии оперативный персонал производит обычно опробование линии путем включения ее под напряжение, так как отыскание места повреждения на линии электропередачи путем ее обхода требует длительного времени, а многие повреждения носят неустойчивый характер. Эту операцию называют повторным включением.
Если КЗ самоустранилось, то линия, на которой произошло неустойчивое повреждение, при повторном включении остается в работе. Поэтому повторные включения при неустойчивых повреждениях принято называть успешными.
На ВЛ успешность повторного включения сильно зависит от номинального напряжения линий. На линиях ПО кВ и выше успешность повторного включения значительно выше, чем на ВЛ 6—35 кВ. Высокий процент успешных повторных включений в сетях высокого и сверхвысокого напряжения объясняется быстродействием релейной защиты (как правило, не более 0,1-0,15 с), большим сечением проводов и расстояний между ними, высокой механической прочностью опор. [Овчинников В. В., Автоматическое повторное включение. — М.:Энергоатомиздат, 1986.— 96 с: ил. — (Б-ка электромонтера; Вып. 587). Энергоатомиздат, 1986]
АВТОМАТИЧЕСКОЕ ПОВТОРНОЕ ВКЛЮЧЕНИЕ (АПВ)
3.3.2. Устройства АПВ должны предусматриваться для быстрого восстановления питания потребителей или межсистемных и внутрисистемных связей путем автоматического включения выключателей, отключенных устройствами релейной защиты.
Должно предусматриваться автоматическое повторное включение:
1) воздушных и смешанных (кабельно-воздушных) линий всех типов напряжением выше 1 кВ. Отказ от применения АПВ должен быть в каждом отдельном случае обоснован. На кабельных линиях 35 кВ и ниже АПВ рекомендуется применять в случаях, когда оно может быть эффективным в связи со значительной вероятностью повреждений с образованием открытой дуги (например, наличие нескольких промежуточных сборок, питание по одной линии нескольких подстанций), а также с целью исправления неселективного действия защиты. Вопрос о применении АПВ на кабельных линиях 110 кВ и выше должен решаться при проектировании в каждом отдельном случае с учетом конкретных условий;
2) шин электростанций и подстанций (см. 3.3.24 и 3.3.25);
3) трансформаторов (см. 3.3.26);
4) ответственных электродвигателей, отключаемых для обеспечения самозапуска других электродвигателей (см. 3.3.38).
Для осуществления АПВ по п. 1-3 должны также предусматриваться устройства АПВ на обходных, шиносоединительных и секционных выключателях.
Допускается в целях экономии аппаратуры выполнение устройства группового АПВ на линиях, в первую очередь кабельных, и других присоединениях 6-10 кВ. При этом следует учитывать недостатки устройства группового АПВ, например возможность отказа в случае, если после отключения выключателя одного из присоединений отключение выключателя другого присоединения происходит до возврата устройства АПВ в исходное положение.
3.3.3. Устройства АПВ должны быть выполнены так, чтобы они не действовали при:
1) отключении выключателя персоналом дистанционно или при помощи телеуправления;
2) автоматическом отключении от релейной защиты непосредственно после включения персоналом дистанционно или при помощи телеуправления;
3) отключении выключателя защитой от внутренних повреждений трансформаторов и вращающихся машин, устройствами противоаварийной автоматики, а также в других случаях отключений выключателя, когда действие АПВ недопустимо. АПВ после действия АЧР (ЧАПВ) должно выполняться в соответствии с 3.3.81.
Устройства АПВ должны быть выполнены так, чтобы была исключена возможностью многократного включения на КЗ при любой неисправности в схеме устройства.
Устройства АПВ должны выполняться с автоматическим возвратом.
3.3.4. При применении АПВ должно, как правило, предусматриваться ускорение действия релейной защиты на случай неуспешного АПВ. Ускорение действия релейной защиты после неуспешного АПВ выполняется с помощью устройства ускорения после включения выключателя, которое, как правило, должно использоваться и при включении выключателя по другим причинам (от ключа управления, телеуправления или устройства АВР). При ускорении защиты после включения выключателя должны быть приняты меры против возможного отключения выключателя защитой под действием толчка тока при включении из-за неодновременного включения фаз выключателя.
Не следует ускорять защиты после включения выключателя, когда линия уже включена под напряжение другим своим выключателем (т. е. при наличии симметричного напряжения на линии).
Допускается не ускорять после АПВ действие защит линий 35 кВ и ниже, выполненных на переменном оперативном токе, если для этого требуется значительное усложнение защит и время их действия при металлическом КЗ вблизи места установки не превосходит 1,5 с.
3.3.5. Устройства трехфазного АПВ (ТАПВ) должны осуществляться преимущественно с пуском при несоответствии между ранее поданной оперативной командой и отключенным положением выключателя; допускается также пуск устройства АПВ от защиты.
3.3.6. Могут применяться, как правило, устройства ТАПВ однократного или двукратного действия (последнее - если это допустимо по условиям работы выключателя). Устройство ТАПВ двукратного действия рекомендуется принимать для воздушных линий, в особенности для одиночных с односторонним питанием. В сетях 35 кВ и ниже устройства ТАПВ двукратного действия рекомендуется применять в первую очередь для линий, не имеющих резервирования по сети.
В сетях с изолированной или компенсированной нейтралью, как правило, должна применяться блокировка второго цикла АПВ в случае замыкания на землю после АПВ первого цикла (например, по наличию напряжений нулевой последовательности). Выдержка времени ТАПВ во втором цикле должна быть не менее 15-20 с.
3.3.7. Для ускорения восстановления нормального режима работы электропередачи выдержка времени устройства ТАПВ (в особенности для первого цикла АПВ двукратного действия на линиях с односторонним питанием) должна приниматься минимально возможной с учетом времени погасания дуги и деионизации среды в месте повреждения, а также с учетом времени готовности выключателя и его привода к повторному включению.
Выдержка времени устройства ТАПВ на линии с двусторонним питанием должна выбираться также с учетом возможного неодновременного отключения повреждения с обоих концов линии; при этом время действия защит, предназначенных для дальнего резервирования, учитываться не должно. Допускается не учитывать разновременности отключения выключателей по концам линии, когда они отключаются в результате срабатывания высокочастотной защиты.
С целью повышения эффективности ТАПВ однократного действия допускается увеличивать его выдержку времени (по возможности с учетом работы потребителя).
3.3.8. На одиночных линиях 110 кВ и выше с односторонним питанием, для которых допустим в случае неуспешного ТАПВ переход на длительную работу двумя фазами, следует предусматривать ТАПВ двукратного действия на питающем конце линии. Перевод линии на работу двумя фазами может производиться персоналом на месте или при помощи телеуправления.
Для перевода линии после неуспешного АПВ на работу двумя фазами следует предусматривать пофазное управление разъединителями или выключателями на питающем и приемном концах линии.
При переводе линии на длительную работу двумя фазами следует при необходимости принимать меры к уменьшению помех в работе линий связи из-за неполнофазного режима работы линии. С этой целью допускается ограничение мощности, передаваемой по линии в неполнофазном режиме (если это возможно по условиям работы потребителя).
В отдельных случаях при наличии специального обоснования допускается также перерыв в работе линии связи на время неполнофазного режима.
3.3.9. На линиях, отключение которых не приводит к нарушению электрической связи между генерирующими источниками, например на параллельных линиях с односторонним питанием, следует устанавливать устройства ТАПВ без проверки синхронизма.
3.3.10. На одиночных линиях с двусторонним питанием (при отсутствии шунтирующих связей) должен предусматриваться один из следующих видов трехфазного АПВ (или их комбинаций):
а) быстродействующее ТАПВ (БАПВ)
б) несинхронное ТАПВ (НАПВ);
в) ТАПВ с улавливанием синхронизма (ТАПВ УС).
Кроме того, может предусматриваться однофазное АПВ (ОАПВ) в сочетании с различными видами ТАПВ, если выключатели оборудованы пофазным управлением и не нарушается устойчивость параллельной работы частей энергосистемы в цикле ОАПВ.
Выбор видов АПВ производится, исходя из совокупности конкретных условий работы системы и оборудования с учетом указаний 3.3.11-3.3.15.
3.3.11. Быстродействующее АПВ, или БАПВ (одновременное включение с минимальной выдержкой времени с обоих концов), рекомендуется предусматривать на линиях по 3.3.10 для автоматического повторного включения, как правило, при небольшом расхождении угла между векторами ЭДС соединяемых систем. БАПВ может применяться при наличии выключателей, допускающих БАПВ, если после включения обеспечивается сохранение синхронной параллельной работы систем и максимальный электромагнитный момент синхронных генераторов и компенсаторов меньше (с учетом необходимого запаса) электромагнитного момента, возникающего при трехфазном КЗ на выводах машины.
Оценка максимального электромагнитного момента должна производиться для предельно возможного расхождения угла за время БАПВ. Соответственно запуск БАПВ должен производиться лишь при срабатывании быстродействующей защиты, зона действия которой охватывает всю линию. БАПВ должно блокироваться при срабатывании резервных защит и блокироваться или задерживаться при работе УРОВ.
Если для сохранения устойчивости энергосистемы при неуспешном БАПВ требуется большой объем воздействий от противоаварийной автоматики, применение БАПВ не рекомендуется.
3.3.12. Несинхронное АПВ (НАПВ) может применяться на линиях по 3.3.10 (в основном 110-220 кВ), если:
а) максимальный электромагнитный момент синхронных генераторов и компенсаторов, возникающий при несинхронном включении, меньше (с учетом необходимого запаса) электромагнитного момента, возникающего при трехфазном КЗ на выводах машины, при этом в качестве практических критериев оценки допустимости НАПВ принимаются расчетные начальные значения периодических составляющих токов статора при угле включения 180°;
б) максимальный ток через трансформатор (автотрансформатор) при угле включения 180° меньше тока КЗ на его выводах при питании от шин бесконечной мощности;
в) после АПВ обеспечивается достаточно быстрая ресинхронизация; если в результате несинхронного автоматического повторного включения возможно возникновение длительного асинхронного хода, должны применяться специальные мероприятия для его предотвращения или прекращения.
При соблюдении этих условий НАПВ допускается применять также в режиме ремонта на параллельных линиях.
При выполнении НАПВ необходимо принять меры по предотвращению излишнего срабатывания защиты. С этой целью рекомендуется, в частности, осуществлять включение выключателей при НАПВ в определенной последовательности, например выполнением АПВ с одной из сторон линии с контролем наличия напряжения на ней после успешного ТАПВ с противоположной стороны.
3.3.13. АПВ с улавливанием синхронизма может применяться на линиях по 3.3.10 для включения линии при значительных (примерно до 4%) скольжениях и допустимом угле.
Возможно также следующее выполнение АПВ. На конце линии, который должен включаться первым, производится ускоренное ТАПВ (с фиксацией срабатывания быстродействующей защиты, зона действия которой охватывает всю линию) без контроля напряжения на линии (УТАПВ БК) или ТАПВ с контролем отсутствия напряжения на линии (ТАПВ ОН), а на другом ее конце - ТАПВ с улавливанием синхронизма. Последнее производится при условии, что включение первого конца было успешным (это может быть определено, например, при помощи контроля наличия напряжения на линии).
Для улавливания синхронизма могут применяться устройства, построенные по принципу синхронизатора с постоянным углом опережения.
Устройства АПВ следует выполнять так, чтобы имелась возможность изменять очередность включения выключателей по концам линии.
При выполнении устройства АПВ УС необходимо стремиться к обеспечению его действия при возможно большей разности частот. Максимальный допустимый угол включения при применении АПВ УС должен приниматься с учетом условий, указанных в 3.3.12. При применении устройства АПВ УС рекомендуется его использование для включения линии персоналом (полуавтоматическая синхронизация).
3.3.14. На линиях, оборудованных трансформаторами напряжения, для контроля отсутствия напряжения (КОН) и контроля наличия напряжения (КНН) на линии при различных видах ТАПВ рекомендуется использовать органы, реагирующие на линейное (фазное) напряжение и на напряжения обратной и нулевой последовательностей. В некоторых случаях, например на линиях без шунтирующих реакторов, можно не использовать напряжение нулевой последовательности.
3.3.15. Однофазное автоматическое повторное включение (ОАПВ) может применяться только в сетях с большим током замыкания на землю. ОАПВ без автоматического перевода линии на длительный неполнофазный режим при устойчивом повреждении фазы следует применять:
а) на одиночных сильно нагруженных межсистемных или внутрисистемных линиях электропередачи;
б) на сильно нагруженных межсистемных линиях 220 кВ и выше с двумя и более обходными связями при условии, что отключение одной из них может привести к нарушению динамической устойчивости энергосистемы;
в) на межсистемных и внутрисистемных линиях разных классов напряжения, если трехфазное отключение линии высшего напряжения может привести к недопустимой перегрузке линий низшего напряжения с возможностью нарушения устойчивости энергосистемы;
г) на линиях, связывающих с системой крупные блочные электростанции без значительной местной нагрузки;
д) на линиях электропередачи, где осуществление ТАПВ сопряжено со значительным сбросом нагрузки вследствие понижения напряжения.
Устройство ОАПВ должно выполняться так, чтобы при выводе его из работы или исчезновении питания автоматически осуществлялся перевод действия защит линии на отключение трех фаз помимо устройства.
Выбор поврежденных фаз при КЗ на землю должен осуществляться при помощи избирательных органов, которые могут быть также использованы в качестве дополнительной быстродействующей защиты линии в цикле ОАПВ, при ТАПВ, БАПВ и одностороннем включении линии оперативным персоналом.
Выдержка временем ОАПВ должна отстраиваться от времени погасания дуги и деионизации среды в месте однофазного КЗ в неполнофазном режиме с учетом возможности неодновременного срабатывания защиты по концам линии, а также каскадного действия избирательных органов.
3.3.16. На линиях по 3.3.15 ОАПВ должно применяться в сочетании с различными видами ТАПВ. При этом должна быть предусмотрена возможность запрета ТАПВ во всех случаях ОАПВ или только при неуспешном ОАПВ. В зависимости от конкретных условий допускается осуществление ТАПВ после неуспешного ОАПВ. В этих случаях предусматривается действие ТАПВ сначала на одном конце линии с контролем отсутствия напряжения на линии и с увеличенной выдержкой времени.
3.3.17. На одиночных линиях с двусторонним питанием, связывающих систему с электростанцией небольшой мощности, могут применяться ТАПВ с автоматической самосинхронизацией (АПВС) гидрогенераторов для гидроэлектростанций и ТАПВ в сочетании с делительными устройствами - для гидро- и теплоэлектростанций.
3.3.18. На линиях с двусторонним питанием при наличии нескольких обходных связей следует применять:
1) при наличии двух связей, а также при наличии трех связей, если вероятно одновременное длительное отключение двух из этих связей (например, двухцепной линии):
несинхронное АПВ (в основном для линий 110-220 кВ и при соблюдении условий, указанных в 3.3.12, но для случая отключения всех связей);
АПВ с проверкой синхронизма (при невозможности выполнения несинхронного АПВ по причинам, указанным в 3.3.12, но для случая отключения всех связей).
Для ответственных линий при наличии двух связей, а также при наличии трех связей, две из которых - двухцепная линия, при невозможности применения НАПВ по причинам, указанным в 3.3.12, разрешается применять устройства ОАПВ, БАПВ или АПВ УС (см. 3.3.11, 3.3.13, 3.3.15). При этом устройства ОАПВ и БАПВ следует дополнять устройством АПВ с проверкой синхронизма;
2) при наличии четырех и более связей, а также при наличии трех связей, если в последнем случае одновременное длительное отключение двух из этих связей маловероятно (например, если все линии одноцепные), - АПВ без проверки синхронизма.
3.3.19. Устройства АПВ с проверкой синхронизма следует выполнять на одном конце линии с контролем отсутствия напряжения на линии и с контролем наличия синхронизма, на другом конце - только с контролем наличия синхронизма. Схемы устройства АПВ с проверкой синхронизма линии должны выполняться одинаковыми на обоих концах с учетом возможности изменения очередности включения выключателей линии при АПВ.
Рекомендуется использовать устройство АПВ с проверкой синхронизма для проверки синхронизма соединяемых систем при включении линии персоналом.
3.3.20. Допускается совместное применение нескольких видов трехфазного АПВ на линии, например БАПВ и ТАПВ с проверкой синхронизма. Допускается также использовать различные виды устройств АПВ на разных концах линии, например УТАПВ БК (см. 3.3.13) на одном конце линии и ТАПВ с контролем наличия напряжения и синхронизма на другом.
3.3.21. Допускается сочетание ТАПВ с неселективными быстродействующими защитами для исправления неселективного действия последних. В сетях, состоящих из ряда последовательно включенных линий, при применении для них неселективных быстродействующих защит для исправления их действия рекомендуется применять поочередное АПВ; могут также применяться устройства АПВ с ускорением защиты до АПВ или с кратностью действия (не более трех), возрастающей по направлению к источнику питания.
3.3.22. При применении трехфазного однократного АПВ линий, питающих трансформаторы, со стороны высшего напряжения которых устанавливаются короткозамыкатели и отделители, для отключения отделителя в бестоковую паузу время действия устройства АПВ должно быть отстроено от суммарного времени включения короткозамыкателя и отключения отделителя. При применении трехфазного АПВ двукратного действия (см. 3.3.6) время действия АПВ в первом цикле по указанному условию не должно увеличиваться, если отключение отделителя предусматривается в бестоковую паузу второго цикла АПВ.
Для линий, на которые вместо выключателей устанавливаются отделители, отключение отделителей в случае неуспешного АПВ в первом цикле должно производиться в бестоковую паузу второго цикла АПВ.
3.3.23. Если в результате действия АПВ возможно несинхронное включение синхронных компенсаторов или синхронных электродвигателей и если такое включение для них недопустимо, а также для исключения подпитки от этих машин места повреждения следует предусматривать автоматическое отключение этих синхронных машин при исчезновении питания или переводить их в асинхронный режим отключением АГП с последующим автоматическим включением или ресинхронизацией после восстановления напряжения в результате успешного АПВ.
Для подстанций с синхронными компенсаторами или синхронными электродвигателями должны применяться меры, предотвращающие излишние срабатывания АЧР при действии АПВ.
3.3.24. АПВ шин электростанций и подстанций при наличии специальной защиты шин и выключателей, допускающих АПВ, должно выполняться по одному из двух вариантов:
1) автоматическим опробованием (постановка шин под напряжение выключателем от АПВ одного из питающих элементов);
2) автоматической сборкой схемы; при этом первым от устройства АПВ включается один из питающих элементов (например, линия, трансформатор), при успешном включении этого элемента производится последующее, возможно более полное автоматическое восстановление схемы доаварийного режима путем включения других элементов. АПВ шин по этому варианту рекомендуется применять в первую очередь для подстанций без постоянного дежурства персонала.
При выполнении АПВ шин должны применяться меры, исключающие несинхронное включение (если оно является недопустимым).
Должна обеспечиваться достаточная чувствительность защиты шин на случай неуспешного АПВ.
3.3.25. На двухтрансформаторных понижающих подстанциях при раздельной работе трансформаторов, как правило, должны предусматриваться устройства АПВ шин среднего и низшего напряжений в сочетании с устройствами АВР; при внутренних повреждениях трансформаторов должно действовать АВР, при прочих повреждениях - АПВ (см. 3.3.42).
Допускается для двухтрансформаторной подстанции, в нормальном режиме которой предусматривается параллельная работа трансформаторов на шинах данного напряжения, устанавливать дополнительно к устройству АПВ устройство АВР, предназначенное для режима, когда один из трансформаторов выведен в резерв.
3.3.26. Устройствами АПВ должны быть оборудованы все одиночные понижающие трансформаторы мощностью более 1 MB·А на подстанциях энергосистем, имеющие выключатель и максимальную токовую защиту с питающей стороны, когда отключение трансформатора приводит к обесточению электроустановок потребителей. Допускается в отдельных случаях действие АПВ и при отключении трансформатора защитой от внутренних повреждений.
3.3.27. При неуспешном АПВ включаемого первым выключателем элемента, присоединенного двумя или более выключателями, АПВ остальных выключателей этого элемента, как правило, должно запрещаться.
3.3.28. При наличии на подстанции или электростанции выключателей с электромагнитным приводом, если от устройства АПВ могут быть одновременно включены два или более выключателей, для обеспечения необходимого уровня напряжения аккумуляторной батареи при включении и для снижения сечения кабелей цепей питания электромагнитов включения следует, как правило, выполнять АПВ так, чтобы одновременное включение нескольких выключателей было исключено (например, применением на присоединениях АПВ с различными выдержками времени).
Допускается в отдельных случаях (преимущественно при напряжении 110 кВ и большом числе присоединений, оборудованных АПВ) одновременное включение от АПВ двух выключателей.
3.3.29. Действие устройств АПВ должно фиксироваться указательными реле, встроенными в реле указателями срабатывания, счетчиками числа срабатываний или другими устройствами аналогичного назначения.
[ ПУЭ]Тематики
- высоковольтный аппарат, оборудование...
- релейная защита
- электроснабжение в целом
Обобщающие термины
Синонимы
Сопутствующие термины
- АПВ воздушных линий
- АПВ смешанных (кабельно-воздушных) линий
- двукратное АПВ
- неуспешное АПВ
- однократное АПВ
- трехкратное АПВ
- цикл АПВ
EN
- AR
- ARC
- auto-reclosing
- automatic reclosing
- automatic recluse
- autoreclosing
- autoreclosure
- reclose
- reclosing
- reclosure
DE
- automatische Wiedereinschaltung
- Kurzunterbrechung
- selbsttätiges Wiederschließen (eines mechanischen Schaltgerätes)
- Wiedereinschaltung, automatische
FR
Русско-французский словарь нормативно-технической терминологии > автоматическое повторное включение
-
11 дистанционное техническое обслуживание
дистанционное техническое обслуживание
Техническое обслуживание объекта, проводимое под управлением персонала без его непосредственного присутствия.
[ОСТ 45.152-99 ]Параллельные тексты EN-RU из ABB Review. Перевод компании Интент
Service from afarДистанционный сервисABB’s Remote Service concept is revolutionizing the robotics industryРазработанная АББ концепция дистанционного обслуживания Remote Service революционизирует робототехникуABB robots are found in industrial applications everywhere – lifting, packing, grinding and welding, to name a few. Robust and tireless, they work around the clock and are critical to a company’s productivity. Thus, keeping these robots in top shape is essential – any failure can lead to serious output consequences. But what happens when a robot malfunctions?Роботы АББ используются во всех отраслях промышленности для перемещения грузов, упаковки, шлифовки, сварки – всего и не перечислить. Надежные и неутомимые работники, способные трудиться день и ночь, они представляют большую ценность для владельца. Поэтому очень важно поддерживать их в надлежащей состоянии, ведь любой отказ может иметь серьезные последствия. Но что делать, если робот все-таки сломался?ABB’s new Remote Service concept holds the answer: This approach enables a malfunctioning robot to alarm for help itself. An ABB service engineer then receives whole diagnostic information via wireless technology, analyzes the data on a Web site and responds with support in just minutes. This unique service is paying off for customers and ABB alike, and in the process is revolutionizing service thinking.Ответом на этот вопрос стала новая концепция Remote Service от АББ, согласно которой неисправный робот сам просит о помощи. C помощью беспроводной технологии специалист сервисной службы АББ получает всю необходимую диагностическую информацию, анализирует данные на web-сайте и через считанные минуты выдает рекомендации по устранению отказа. Эта уникальная возможность одинаково ценна как для заказчиков, так и для самой компании АББ. В перспективе она способна в корне изменить весь подход к организации технического обслуживания.Every minute of production downtime can have financially disastrous consequences for a company. Traditional reactive service is no longer sufficient since on-site service engineer visits also demand great amounts of time and money. Thus, companies not only require faster help from the service organization when needed but they also want to avoid disturbances in production.Каждая минута простоя производства может привести к губительным финансовым последствиям. Традиционная организация сервиса, предусматривающая ликвидацию возникающих неисправностей, становится все менее эффективной, поскольку вызов сервисного инженера на место эксплуатации робота сопряжен с большими затратами времени и денег. Предприятия требуют от сервисной организации не только более быстрого оказания помощи, но и предотвращения возможных сбоев производства.In 2006, ABB developed a new approach to better meet customer’s expectations: Using the latest technologies to reach the robots at customer sites around the world, ABB could support them remotely in just minutes, thereby reducing the need for site visits. Thus the new Remote Service concept was quickly brought to fruition and was launched in mid-2007. Statistics show that by using the system the majority of production stoppages can be avoided.В 2006 г. компания АББ разработала новый подход к удовлетворению ожиданий своих заказчиков. Использование современных технологий позволяет специалистам АББ получать информацию от роботов из любой точки мира и в считанные минуты оказывать помощь дистанционно, в результате чего сокращается количество выездов на место установки. Запущенная в середине 2007 г. концепция Remote Service быстро себя оправдала. Статистика показывает, что её применение позволило предотвратить большое число остановок производства.Reactive maintenance The hardware that makes ABB Remote Service possible consists of a communication unit, which has a function similar to that of an airplane’s so-called black box 1. This “service box” is connected to the robot’s control system and can read and transmit diagnostic information. The unit not only reads critical diagnostic information that enables immediate support in the event of a failure, but also makes it possible to monitor and analyze the robot’s condition, thereby proactively detecting the need for maintenance.Устранение возникающих неисправностей Аппаратное устройство, с помощью которого реализуется концепция Remote Service, представляет собой коммуникационный блок, работающий аналогично черному ящику самолета (рис. 1). Этот блок считывает диагностические данные из контроллера робота и передает их по каналу GSM. Считывается не только информация, необходимая для оказания немедленной помощи в случае отказа, но и сведения, позволяющие контролировать и анализировать состояние робота для прогнозирования неисправностей и планирования технического обслуживания.If the robot breaks down, the service box immediately stores the status of the robot, its historical data (as log files), and diagnostic parameters such as temperature and power supply. Equipped with a built-in modem and using the GSM network, the box transmits the data to a central server for analysis and presentation on a dedicated Web site. Alerts are automatically sent to the nearest of ABB’s 1,200 robot service engineers who then accesses the detailed data and error log to analyze the problem.При поломке робота сервисный блок немедленно сохраняет данные о его состоянии, сведения из рабочего журнала, а также значения диагностических параметров (температура и характеристики питания). Эти данные передаются встроенным GSM-модемом на центральный сервер для анализа и представления на соответствующем web-сайте. Аварийные сообщения автоматически пересылаются ближайшему к месту аварии одному из 1200 сервисных инженеров-робототехников АББ, который получает доступ к детальной информации и журналу аварий для анализа возникшей проблемы.A remotely based ABB engineer can then quickly identify the exact fault, offering rapid customer support. For problems that cannot be solved remotely, the service engineer can arrange for quick delivery of spare parts and visit the site to repair the robot. Even if the engineer must make a site visit, service is faster, more efficient and performed to a higher standard than otherwise possible.Специалист АББ может дистанционно идентифицировать отказ и оказать быструю помощь заказчику. Если неисправность не может быть устранена дистанционно, сервисный инженер организовывает доставку запасных частей и выезд ремонтной бригады. Даже если необходимо разрешение проблемы на месте, предшествующая дистанционная диагностика позволяет минимизировать объем работ и сократить время простоя.Remote Service enables engineers to “talk” to robots remotely and to utilize tools that enable smart, fast and automatic analysis. The system is based on a machine-to-machine (M2M) concept, which works automatically, requiring human input only for analysis and personalized customer recommendations. ABB was recognized for this innovative solution at the M2M United Conference in Chicago in 2008 Factbox.Remote Service позволяет инженерам «разговаривать» с роботами на расстоянии и предоставляет в их распоряжение интеллектуальные средства быстрого автоматизированного анализа. Система основана на основе технологии автоматической связи машины с машиной (M2M), где участие человека сводится к анализу данных и выдаче рекомендаций клиенту. В 2008 г. это инновационное решение от АББ получило приз на конференции M2M United Conference в Чикаго (см. вставку).Proactive maintenanceRemote Service also allows ABB engineers to monitor and detect potential problems in the robot system and opens up new possibilities for proactive maintenance.Прогнозирование неисправностейRemote Service позволяет инженерам АББ дистанционно контролировать состояние роботов и прогнозировать возможные неисправности, что открывает новые возможности по организации профилактического обслуживания.The service box regularly takes condition measurements. By monitoring key parameters over time, Remote Service can identify potential failures and when necessary notify both the end customer and the appropriate ABB engineer. The management and storage of full system backups is a very powerful service to help recover from critical situations caused, for example, by operator errors.Сервисный блок регулярно выполняет диагностические измерения. Непрерывно контролируя ключевые параметры, Remote Service может распознать потенциальные опасности и, при необходимости, оповещать владельца оборудования и соответствующего специалиста АББ. Резервирование данных для возможного отката является мощным средством, обеспечивающим восстановление системы в критических ситуациях, например, после ошибки оператора.The first Remote Service installation took place in the automotive industry in the United States and quickly proved its value. The motherboard in a robot cabinet overheated and the rise in temperature triggered an alarm via Remote Service. Because of the alarm, engineers were able to replace a faulty fan, preventing a costly production shutdown.Первая система Remote Service была установлена на автозаводе в США и очень скоро была оценена по достоинству. Она обнаружила перегрев материнской платы в шкафу управления роботом и передала сигнал о превышении допустимой температуры, благодаря чему инженеры смогли заменить неисправный вентилятор и предотвратить дорогостоящую остановку производства.MyRobot: 24-hour remote access
Having regular access to a robot’s condition data is also essential to achieving lean production. At any time, from any location, customers can verify their robots’ status and access maintenance information and performance reports simply by logging in to ABB’s MyRobot Web site. The service enables customers to easily compare performances, identify bottlenecks or developing issues, and initiate the mostСайт MyRobot: круглосуточный дистанционный доступДля того чтобы обеспечить бесперебойное производство, необходимо иметь регулярный доступ к информации о состоянии робота. Зайдя на соответствующую страницу сайта MyRobot компании АББ, заказчики получат все необходимые данные, включая сведения о техническом обслуживании и отчеты о производительности своего робота. Эта услуга позволяет легко сравнивать данные о производительности, обнаруживать возможные проблемы, а также оптимизировать планирование технического обслуживания и модернизации. С помощью MyRobot можно значительно увеличить выпуск продукции и уменьшить количество выбросов.Award-winning solutionIn June 2008, the innovative Remote Service solution won the Gold Value Chain award at the M2M United Conference in Chicago. The value chain award honors successful corporate adopters of M2M (machine–to-machine) technology and highlights the process of combining multiple technologies to deliver high-quality services to customers. ABB won in the categoryof Smart Services.Приз за удачное решениеВ июне 2008 г. инновационное решение Remote Service получило награду Gold Value Chain (Золотая цепь) на конференции M2M United Conference в Чикаго. «Золотая цепь» присуждается за успешное масштабное внедрение технологии M2M (машина – машина), а также за достижения в объединении различных технологий для предоставления высококачественных услуг заказчикам. АББ одержала победу в номинации «Интеллектуальный сервис».Case study: Tetley Tetley GB Ltd is the world’s second-largest manufacturer and distributor of tea. The company’s manufacturing and distribution business is spread across 40 countries and sells over 60 branded tea bags. Tetley’s UK tea production facility in Eaglescliffe, County Durham is the sole producer of Tetley tea bags 2.Пример применения: Tetley Компания TetleyGB Ltd является вторым по величине мировым производителем и поставщиком чая. Производственные и торговые филиалы компании имеются в 40 странах, а продукция распространяется под 60 торговыми марками. Чаеразвесочная фабрика в Иглсклифф, графство Дарем, Великобритания – единственный производитель чая Tetley в пакетиках (рис. 2).ABB offers a flexible choice of service agreements for both new and existing robot installations, which can help extend the mean time between failures, shorten the time to repair and lower the cost of automated production.Предлагаемые АББ контракты на выполнение технического обслуживания как уже имеющихся, так и вновь устанавливаемых роботов, позволяют значительно увеличить среднюю наработку на отказ, сократить время ремонта и общую стоимость автоматизированного производства.Robots in the plant’s production line were tripping alarms and delaying the whole production cycle. The spurious alarms resulted in much unnecessary downtime that was spent resetting the robots in the hope that another breakdown could be avoided. Each time an alarm was tripped, several hours of production time was lost. “It was for this reason that we were keen to try out ABB’s Remote Service agreement,” said Colin Trevor, plant maintenance manager.Установленные в технологической линии роботы выдавали аварийные сигналы, задерживающие выполнение производственного цикла. Ложные срабатывания вынуждали перезапускать роботов в надежде предотвратить возможные отказы, в результате чего после каждого аварийного сигнала производство останавливалось на несколько часов. «Именно поэтому мы решили попробовать заключить с АББ контракт на дистанционное техническое обслуживание», – сказал Колин Тревор, начальник технической службы фабрики.To prevent future disruptions caused by unplanned downtime, Tetley signed an ABB Response Package service agreement, which included installing a service box and system infrastructure into the robot control systems. Using the Remote Service solution, ABB remotely monitors and collects data on the “wear and tear” and productivity of the robotic cells; this data is then shared with the customer and contributes to smooth-running production cycles.Для предотвращения ущерба в результате незапланированных простоев Tetley заключила с АББ контракт на комплексное обслуживание Response Package, согласно которому системы управления роботами были дооборудованы сервисными блоками с необходимой инфраструктурой. С помощью Remote Service компания АББ дистанционно собирает данные о наработке, износе и производительности роботизированных модулей. Эти данные предоставляются заказчику для оптимизации загрузки производственного оборудования.Higher production uptimeSince the implementation of Remote Service, Tetley has enjoyed greatly reduced robot downtime, with no further disruptions caused by unforeseen problems. “The Remote Service package has dramatically changed the plant,” said Trevor. “We no longer have breakdown issues throughout the shift, helping us to achieve much longer periods of robot uptime. As we have learned, world-class manufacturing facilities need world-class support packages. Remote monitoring of our robots helps us to maintain machine uptime, prevent costly downtime and ensures my employees can be put to more valuable use.”Увеличение полезного времениС момента внедрения Remote Service компания Tetley была приятно удивлена резким сокращением простоя роботов и отсутствием незапланированных остановок производства. «Пакет Remote Service резко изменил ситуацию на предприятии», – сказал Тревор. «Мы избавились от простоев роботов и смогли резко увеличить их эксплуатационную готовность. Мы поняли, что для производственного оборудования мирового класса необходим сервисный пакет мирового класса. Дистанционный контроль роботов помогает нам поддерживать их в рабочем состоянии, предотвращать дорогостоящие простои и задействовать наш персонал для выполнения более важных задач».Service accessRemote Service is available worldwide, connecting more than 500 robots. Companies that have up to 30 robots are often good candidates for the Remote Service offering, as they usually have neither the engineers nor the requisite skills to deal with robotics faults themselves. Larger companies are also enthusiastic about Remote Service, as the proactive services will improve the lifetime of their equipment and increase overall production uptime.Доступность сервисаСеть Remote Service охватывает более 700 роботов по всему миру. Потенциальными заказчиками Remote Service являются компании, имеющие до 30 роботов, но не имеющие инженеров и техников, способных самостоятельно устранять их неисправности. Интерес к Remote Service проявляют и более крупные компании, поскольку они заинтересованы в увеличении срока службы и эксплуатационной готовности производственного оборудования.In today’s competitive environment, business profitability often relies on demanding production schedules that do not always leave time for exhaustive or repeated equipment health checks. ABB’s Remote Service agreements are designed to monitor its customers’ robots to identify when problems are likely to occur and ensure that help is dispatched before the problem can escalate. In over 60 percent of ABB’s service calls, its robots can be brought back online remotely, without further intervention.В условиях современной конкуренции окупаемость бизнеса часто зависит от соблюдения жестких графиков производства, не оставляющих времени для полномасштабных или периодических проверок исправности оборудования. Контракт Remote Service предусматривает мониторинг состояния роботов заказчика для прогнозирования возможных неисправностей и принятие мер по их предотвращению. В более чем 60 % случаев для устранения неисправности достаточно дистанционной консультации в сервисной службе АББ, дальнейшего вмешательства не требуется.ABB offers a flexible choice of service agreements for both new and existing robot installations, which helps extend the mean time between failures, shorten the time to repair and lower the total cost of ownership. With four new packages available – Support, Response, Maintenance and Warranty, each backed up by ABB’s Remote Service technology – businesses can minimize the impact of unplanned downtime and achieve improved production-line efficiency.Компания АББ предлагает гибкий выбор контрактов на выполнение технического обслуживания как уже имеющихся, так и вновь устанавливаемых роботов, которые позволяют значительно увеличить среднюю наработку на отказ, сократить время ремонта и эксплуатационные расходы. Четыре новых пакета на основе технологии Remote Service – Support, Response, Maintenance и Warranty – позволяют минимизировать внеплановые простои и значительно повысить эффективность производства.The benefits of Remote Sevice are clear: improved availability, fewer service visits, lower maintenance costs and maximized total cost of ownership. This unique service sets ABB apart from its competitors and is the beginning of a revolution in service thinking. It provides ABB with a great opportunity to improve customer access to its expertise and develop more advanced services worldwide.Преимущества дистанционного технического обслуживания очевидны: повышенная надежность, уменьшение выездов ремонтных бригад, уменьшение затрат на обслуживание и общих эксплуатационных расходов. Эта уникальная услуга дает компании АББ преимущества над конкурентами и демонстрирует революционный подход к организации сервиса. Благодаря ей компания АББ расширяет доступ заказчиков к опыту своих специалистов и получает возможность более эффективного оказания технической помощи по всему миру.Тематики
- тех. обсл. и ремонт средств электросвязи
Обобщающие термины
EN
Русско-английский словарь нормативно-технической терминологии > дистанционное техническое обслуживание
12 ИБП для централизованных систем питания
ИБП для централизованных систем питания
ИБП для централизованного питания нагрузок
-
[Интент]ИБП для централизованных систем питания
А. П. Майоров
Для многих предприятий всесторонняя защита данных имеет жизненно важное значение. Кроме того, есть виды деятельности, в которых прерывания подачи электроэнергии не допускаются даже на доли секунды. Так работают расчетные центры банков, больницы, аэропорты, центры обмена трафиком между различными сетями. В такой же степени критичны к электропитанию телекоммуникационное оборудование, крупные узлы Интернет, число ежедневных обращений к которым исчисляется десятками и сотнями тысяч. Третья часть обзора по ИБП посвящена оборудованию, предназначенному для обеспечения питания особо важных объектов.
Централизованные системы бесперебойного питания применяют в тех случаях, когда прерывание подачи электроэнергии недопустимо для работы большинства единиц оборудования, составляющих одну информационную или технологическую систему. Как правило, проблемы питания рассматривают в рамках единого проекта наряду со многими другими подсистемами здания, поскольку они требуют вложения значительных средств и увязки с силовой электропроводкой, коммутационным электрооборудованием и аппаратурой кондиционирования. Изначально системы бесперебойного питания рассчитаны на долгие годы эксплуатации, их срок службы можно сравнить со сроком службы кабельных подсистем здания и основного компьютерного оборудования. За 15—20 лет функционирования предприятия оснащение его рабочих станций обновляется три-четыре раза, несколько раз изменяется планировка помещений и производится их ремонт, но все эти годы система бесперебойного питания должна работать безотказно. Для ИБП такого класса долговечность превыше всего, поэтому в их технических спецификациях часто приводят значение важнейшего технического показателя надежности — среднего времени наработки на отказ (Mean Time Before Failure — MTBF). Во многих моделях с ИБП оно превышает 100 тыс. ч, в некоторых из них достигает 250 тыс. ч (т. е. 27 лет непрерывной работы). Правда, сравнивая различные системы, нужно учитывать условия, для которых этот показатель задан, и к предоставленным цифрам относиться осторожно, поскольку условия работы оборудования разных производителей неодинаковы.
Батареи аккумуляторов
К сожалению, наиболее дорогостоящий компонент ИБП — батарея аккумуляторов так долго работать не может. Существует несколько градаций качества батарей, которые различаются сроком службы и, естественно, ценой. В соответствии с принятой два года назад конвенцией EUROBAT по среднему сроку службы батареи разделены на четыре группы:
10+ — высоконадежные,
10 — высокоэффективные,
5—8 — общего назначения,
3—5 — стандартные коммерческие.Учитывая исключительно жесткую конкуренцию на рынке ИБП малой мощности, производители стремятся снизить до минимума начальную стоимость своих моделей, поэтому часто комплектуют их самыми простыми батареями. Применительно к этой группе продуктов такой подход оправдан, поскольку упрощенные ИБП изымают из обращения вместе с защищаемыми ими персональными компьютерами. Впервые вступающие на этот рынок производители, пытаясь оттеснить конкурентов, часто используют в своих интересах неосведомленность покупателей о проблеме качества батарей и предлагают им сравнимые по остальным показателям модели за более низкую цену. Имеются случаи, когда партнеры крупной фирмы комплектуют ее проверенные временем и признанные рынком модели ИБП батареями, произведенными в развивающихся странах, где контроль за технологическим процессом ослаблен, а, значит, срок службы батарей меньше по сравнению с "кондиционными" изделиями. Поэтому, подбирая для себя ИБП, обязательно поинтересуйтесь качеством батареи и ее производителем, избегайте продукции неизвестных фирм. Следование этим рекомендациям сэкономит вам значительные средства при эксплуатации ИБП.
Все сказанное еще в большей степени относится к ИБП высокой мощности. Как уже отмечалось, срок службы таких систем исчисляется многими годами. И все же за это время приходится несколько раз заменять батареи. Как это ни покажется странным, но расчеты, основанные на ценовых и качественных параметрах батарей, показывают, что в долгосрочной перспективе наиболее выгодны именно батареи высшего качества, несмотря на их первоначальную стоимость. Поэтому, имея возможность выбора, устанавливайте батареи только "высшей пробы". Гарантированный срок службы таких батарей приближается к 15 годам.
Не менее важный аспект долговечности мощных систем бесперебойного питания — условия эксплуатации аккумуляторных батарей. Чтобы исключить непредсказуемые, а следовательно, часто приводящие к аварии перерывы в подаче электропитания, абсолютно все включенные в приведенную в статье таблицу модели оснащены самыми совершенными схемами контроля за состоянием батарей. Не мешая выполнению основной функции ИБП, схемы мониторинга, как правило, контролируют следующие параметры батареи: зарядный и разрядный токи, возможность избыточного заряда, рабочую температуру, емкость.
Кроме того, с их помощью рассчитываются такие переменные, как реальное время автономной работы, конечное напряжение зарядки в зависимости от реальной температуры внутри батареи и др.
Подзарядка батареи происходит по мере необходимости и в наиболее оптимальном режиме для ее текущего состояния. Когда емкость батареи снижается ниже допустимого предела, система контроля автоматически посылает предупреждающий сигнал о необходимости ее скорой замены.
Топологические изыски
Долгое время специалисты по системам электропитания руководствовались аксиомой, что мощные системы бесперебойного питания должны иметь топологию on-line. Считается, что именно такая топология гарантирует защиту от всех нарушений на линиях силового питания, позволяет фильтровать помехи во всем частотном диапазоне, обеспечивает на выходе чистое синусоидальное напряжение с номинальными параметрами. Однако за качество электропитания приходится платить повышенным выделением тепловой энергии, сложностью электронных схем, а следовательно, потенциальным снижением надежности. Но, несмотря на это, за многолетнюю историю выпуска мощных ИБП были разработаны исключительно надежные аппараты, способные работать в самых невероятных условиях, когда возможен отказ одного или даже нескольких узлов одновременно. Наиболее важным и полезным элементом мощных ИБП является так называемый байпас. Это обходной путь подачи энергии на выход в случае ремонтных и профилактических работ, вызванных отказом некоторых компонентов систем или возникновением перегрузки на выходе. Байпасы бывают ручными и автоматическими. Они формируются несколькими переключателями, поэтому для их активизации требуется некоторое время, которое инженеры постарались снизить до минимума. И раз уж такой переключатель был создан, то почему бы не использовать его для снижения тепловыделения в то время, когда питающая сеть пребывает в нормальном рабочем состоянии. Так появились первые признаки отступления от "истинного" режима on-line.
Новая топология отдаленно напоминает линейно-интерактивную. Устанавливаемый пользователем системы порог срабатывания определяет момент перехода системы в так называемый экономный режим. При этом напряжение из первичной сети поступает на выход системы через байпас, однако электронная схема постоянно следит за состоянием первичной сети и в случае недопустимых отклонений мгновенно переключается на работу в основном режиме on-line.
Подобная схема применена в ИБП серии Synthesis фирмы Chloride (Сети и системы связи, 1996. № 10. С. 131), механизм переключения в этих устройствах назван "интеллектуальным" ключом. Если качество входной линии укладывается в пределы, определяемые самим пользователем системы, аппарат работает в линейно-интерактивном режиме. При достижении одним из контролируемых параметров граничного значения система начинает работать в нормальном режиме on-line. Конечно, в этом режиме система может работать и постоянно.
За время эксплуатации системы отход от исходной аксиомы позволяет экономить весьма значительные средства за счет сокращения тепловыделения. Сумма экономии оказывается сопоставимой со стоимостью оборудования.
Надо отметить, что от своих исходных принципов отошла еще одна фирма, ранее выпускавшая только линейно-интерактивные ИБП и ИБП типа off-line сравнительно небольшой мощности. Теперь она превысила прежний верхний предел мощности своих ИБП (5 кВА) и построила новую систему по топологии on-line. Я имею в виду фирму АРС и ее массив электропитания Simmetra (Сети и системы связи. 1997. № 4. С. 132). Создатели попытались заложить в систему питания те же принципы повышения надежности, которые применяют при построении особо надежной компьютерной техники. В модульную конструкцию введена избыточность по отношению к управляющим модулям и батареям. В любом из трех выпускаемых шасси из отдельных модулей можно сформировать нужную на текущий момент систему и в будущем наращивать ее по мере надобности. Суммарная мощность самого большого шасси достигает 16 кВА. Еще рано сравнивать эту только что появившуюся систему с другими включенными в таблицу. Однако факт появления нового продукта в этом исключительно устоявшемся секторе рынка сам по себе интересен.
Архитектура
Суммарная выходная мощность централизованных систем бесперебойного питания может составлять от 10—20 кВА до 200—300 МВА и более. Соответственно видоизменяется и структура систем. Как правило, она включают в себя несколько источников, соединенных параллельно тем или иным способом. Аппаратные шкафы устанавливают в специально оборудованных помещениях, где уже находятся распределительные шкафы выходного напряжения и куда подводят мощные входные силовые линии электропитания. В аппаратных помещениях поддерживается определенная температура, а за функционированием оборудования наблюдают специалисты.
Многие реализации системы питания для достижения необходимой надежности требуют совместной работы нескольких ИБП. Существует ряд конфигураций, где работают сразу несколько блоков. В одних случаях блоки можно добавлять постепенно, по мере необходимости, а в других — системы приходится комплектовать в самом начале проекта.
Для повышения суммарной выходной мощности используют два варианта объединения систем: распределенный и централизованный. Последний обеспечивает более высокую надежность, но первый более универсален. Блоки серии EDP-90 фирмы Chloride допускают объединение двумя способами: и просто параллельно (распределенный вариант), и с помощью общего распределительного блока (централизованный вариант). При выборе способа объединения отдельных ИБП необходим тщательный анализ структуры нагрузки, и в этом случае лучше всего обратиться за помощью к специалистам.
Применяют параллельное соединение блоков с централизованным байпасом, которое используют для повышения общей надежности или увеличения общей выходной мощности. Число объединяемых блоков не должно превышать шести. Существуют и более сложные схемы с избыточностью. Так, например, чтобы исключить прерывание подачи питания во время профилактических и ремонтных работ, соединяют параллельно несколько блоков с подключенными к отдельному ИБП входными линиями байпасов.
Особо следует отметить сверхмощные ИБП серии 3000 фирмы Exide. Суммарная мощность системы питания, построенная на модульных элементах этой серии, может достигать нескольких миллионов вольт-ампер, что сравнимо с номинальной мощностью генераторов некоторых электростанций. Все компоненты серии 3000 без исключения построены на модульном принципе. На их основе можно создать особо мощные системы питания, в точности соответствующие исходным требованиям. В процессе эксплуатации суммарную мощность систем можно наращивать по мере увеличения нагрузки. Однако следует признать, что систем бесперебойного питания такой мощности в мире не так уж много, их строят по специальным контрактам. Поэтому серия 3000 не включена в общую таблицу. Более подробные данные о ней можно получить на Web-узле фирмы Exide по адресу http://www.exide.com или в ее московском представительстве.
Важнейшие параметры
Для систем с высокой выходной мощностью очень важны показатели, которые для менее мощных систем не имеют первостепенного значения. Это, например, КПД — коэффициент полезного действия (выражается либо действительным числом меньше единицы, либо в процентах), показывающий, какая часть активной входной мощности поступает к нагрузке. Разница значений входной и выходной мощности рассеивается в виде тепла. Чем выше КПД, тем меньше тепловой энергии выделяется в аппаратной комнате и, значит, для поддержания нормальных рабочих условий требуется менее мощная система кондиционирования.
Чтобы представить себе, о каких величинах идет речь, рассчитаем мощность, "распыляемую" ИБП с номинальным значением на выходе 8 МВт и с КПД, равным 95%. Такая система будет потреблять от первичной силовой сети 8,421 МВт — следовательно, превращать в тепло 0,421 МВт или 421 кВт. При повышении КПД до 98% при той же выходной мощности рассеиванию подлежат "всего" 163 кВт. Напомним, что в данном случае нужно оперировать активными мощностями, измеряемыми в ваттах.
Задача поставщиков электроэнергии — подавать требуемую мощность ее потребителям наиболее экономным способом. Как правило, в цепях переменного тока максимальные значения напряжения и силы тока из-за особенностей нагрузки не совпадают. Из-за этого смещения по фазе снижается эффективность доставки электроэнергии, поскольку при передаче заданной мощности по линиям электропередач, через трансформаторы и прочие элементы систем протекают токи большей силы, чем в случае отсутствия такого смещения. Это приводит к огромным дополнительным потерям энергии, возникающим по пути ее следования. Степень сдвига по фазе измеряется не менее важным, чем КПД, параметром систем питания — коэффициентом мощности.
Во многих странах мира существуют нормы на допустимое значение коэффициента мощности систем питания и тарифы за электроэнергию нередко зависят от коэффициента мощности потребителя. Суммы штрафов за нарушение нормы оказываются настольно внушительными, что приходится заботиться о повышении коэффициента мощности. С этой целью в ИБП встраивают схемы, которые компенсируют сдвиг по фазе и приближают значение коэффициента мощности к единице.
На распределительную силовую сеть отрицательно влияют и нелинейные искажения, возникающие на входе блоков ИБП. Почти всегда их подавляют с помощью фильтров. Однако стандартные фильтры, как правило, уменьшают искажения только до уровня 20—30%. Для более значительного подавления искажений на входе систем ставят дополнительные фильтры, которые, помимо снижения величины искажений до нескольких процентов, повышают коэффициент мощности до 0,9—0,95. С 1998 г. встраивание средств компенсации сдвига по фазе во все источники электропитания компьютерной техники в Европе становится обязательным.
Еще один важный параметр мощных систем питания — уровень шума, создаваемый такими компонентами ИБП, как, например, трансформаторы и вентиляторы, поскольку их часто размещают вместе в одном помещении с другим оборудованием — там где работает и персонал.
Чтобы представить себе, о каких значениях интенсивности шума идет речь, приведем для сравнения такие примеры: уровень шума, производимый шелестом листвы и щебетанием птиц, равен 40 дБ, уровень шума на центральной улице большого города может достигать 80 дБ, а взлетающий реактивный самолет создает шум около 100 дБ.
Достижения в электронике
Мощные системы бесперебойного электропитания выпускаются уже более 30 лет. За это время бесполезное тепловыделение, объем и масса их сократились в несколько раз. Во всех подсистемах произошли и значительные технологические изменения. Если раньше в инверторах использовались ртутные выпрямители, а затем кремниевые тиристоры и биполярные транзисторы, то теперь в них применяются высокоскоростные мощные биполярные транзисторы с изолированным затвором (IGBT). В управляющих блоках аналоговые схемы на дискретных компонентах сначала были заменены на цифровые микросхемы малой степени интеграции, затем — микропроцессорами, а теперь в них установлены цифровые сигнальные процессоры (Digital Signal Processor — DSP).
В системах питания 60-х годов для индикации их состояния использовались многочисленные аналоговые измерительные приборы. Позднее их заменили более надежными и информативными цифровыми панелями из светоизлучающих диодов и жидкокристаллических индикаторов. В наше время повсеместно используют программное управление системами питания.
Еще большее сокращение тепловых потерь и общей массы ИБП дает замена массивных трансформаторов, работающих на частоте промышленной сети (50 или 60 Гц), высокочастотными трансформаторами, работающими на ультразвуковых частотах. Между прочим, высокочастотные трансформаторы давно применяются во внутренних источниках питания компьютеров, а вот в ИБП их стали устанавливать сравнительно недавно. Применение IGBT-приборов позволяет строить и бестрансформаторные инверторы, при этом внутреннее построение ИБП существенно меняется. Два последних усовершенствования применены в ИБП серии Synthesis фирмы Chloride, отличающихся уменьшенным объемом и массой.
Поскольку электронная начинка ИБП становится все сложнее, значительную долю их внутреннего объема теперь занимают процессорные платы. Для радикального уменьшения суммарной площади плат и изоляции их от вредных воздействий электромагнитных полей и теплового излучения используют электронные компоненты для так называемой технологии поверхностного монтажа (Surface Mounted Devices — SMD) — той самой, которую давно применяют в производстве компьютеров. Для защиты электронных и электротехнических компонентов имеются специальные внутренние экраны.
***
Со временем серьезный системный подход к проектированию материальной базы предприятия дает значительную экономию не только благодаря увеличению срока службы всех компонентов "интегрированного интеллектуального" здания, но и за счет сокращения расходов на электроэнергию и текущее обслуживание. Использование централизованных систем бесперебойного питания в пересчете на стоимость одного рабочего места дешевле, чем использование маломощных ИБП для рабочих станций и даже ИБП для серверных комнат. Однако, чтобы оценить это, нужно учесть все факторы установки таких систем.
Предположим, что предприятие свое помещение арендует. Тогда нет никакого смысла разворачивать дорогостоящую систему централизованного питания. Если через пять лет руководство предприятия не намерено заниматься тем же, чем занимается сегодня, то даже ИБП для серверных комнат обзаводиться нецелесообразно. Но если оно рассчитывает на то, что производство будет держаться на плаву долгие годы и решило оснастить принадлежащее им здание системой бесперебойного питания, то для выбора такой системы нужно воспользоваться услугами специализированных фирм. Сейчас их немало и в России. От этих же фирм можно получить информацию о так называемых системах гарантированного электропитания, в которые включены дизельные электрогенераторы и прочие, более экзотические источники энергии.
Нам же осталось рассмотреть лишь методы управления ИБП, что мы и сделаем в одном из следующих номеров нашего журнала
[ http://www.ccc.ru/magazine/depot/97_07/read.html?0502.htm]Тематики
Синонимы
EN
Русско-английский словарь нормативно-технической терминологии > ИБП для централизованных систем питания
13 бленкер
warning flag, (failure) flag
(сигнализатор отказа, флажок)
- (окошко) — warning flag window (cutout)
белые секторы должны появиться на бленкере (т.е. в окошке бленкера) — the white sectors shall appear in the warning flag window (cutout)
- (шторка, планка, перекрывающая показания счетчика) (рис. 73) — fail flag;
- аг (авиагоризонта прибора пкп, рис. 72) — gyro /att/ flag
бленкер "аг" выпадает в случае отказа канала агд или ненадежности информации о пространственном положении ла. — the gyro flag appears to warn us if the attitude display is incorrect or vertical gyro is off.
- бокового канала (приборов пнп, hпп) (рис. 71, 73) — loc-vor /vor-loc/ flag; loc flag
loc flag provides lateral radio information.
- бокового отклонения — crosstrack deviation (warning) flag
- виден, выпущен; — view, in view/; posed
check that the nav flag is in view.
- вычиспения командных сигналов — computer flag
бленкер "ву" появляется на лицевой панели прибора при неисправности источника командных сигналов. при появлении бленкера "ву" пользоваться индикацией командных планок нельзя, — the computer flag appears when monitor circuit detects а fault in the signal sources used to generate the сommand /steering/ signal. all indications of the command bars should be disregarded if the computer flag is visible.
- глиссады 'г" (рис. 71, 72) — glide slope (gs) flag
появление бленкера "г" сигнализирует о неисправности канала глиссады. — the gs flag warns us if the glide slope deviation display is incorrect
- закрыт (виден в окошке, или красная (белая) шторка видна в окошке) — flag is visible /deflected into view, in view, exposed/ flag window shows red (white)
- курса "к" (рис. 71, 72) — loc-vor flag, vor-loc flag, loc flag
бленкер "к" появляется при отсутствии или недостаточности сигнала от курсового маяка или приводной радиостанции. — the loc flag appears when the localizer or vor station signal is lost or too weak to provide reliable information.
- не виден — flag is out of view /sight/, flag is retracted out of sight, flag is retracted behind the mask. check that the nav flag is out of view.
- нерабочего состояния (прибора) — fail (warning) flag
- отказа "аг" (отказа цепи авиагоризонта, т.е. индикации положения самолета в пространстве по крену и тангажу) (рис. 72) — gyro flag, gyro off flag; атт flag the gyro (or attitude) flag warns us if the attitude display is incorrect.
- отказа — failure /warning/ flag
- отказа бокового канала (курсa) — loc-vor /vor-loc/ (warning) flag, loc flag
- отказа глиссадного маяка (отказа канала индикации глиссады)(рис.71,72) — glide slope warning flag, gs flag
- отказа датчика и канала текущего курса (кс) — heading flag, hdg flag
- отказа индикации отклонения от линии заданного пути (рис. 70) — loc-vor /vor-loc/ flag, loc flag
- отказа инерциальной навигационной системы — ins warning flag
- отказа "кс" (курсовой системы) (рис. 73) — heading warning flag, hdg flag
появление бленкера "кс" сигнализирует о неисправности канала курсовой системы. — the hdg flag warns us if the compass (system) display is incorrect.
- отказа курса — loc flag,loc-vor flag; vor-loc flag
срабатывает по сигналам приемника vor и kpm, и выпадает при потере сигналов от крм. — the loc flag is controlled from the vor/loc receiver and becomes fully visible when the localizer signal falls below a predetermined, safe, usable level.
- отказа курса vor — vor fail flag
- отказа курсового маяка ("к") (отказа канала индикации курса или сигналов курсового маяка) (рис. 73) — localizer warning flag, loc flag
- отказа (основного) питания пилотажно-командного прибора (пкп) — fd flag, flight director fail flag; dir off flag appearance of flag indicates failure of the adi primary power, or selected flight director.
- (отказа) питания (красно-6eлый) — (red-white) power failure flag
- отказа посадочного курса — rw (runway) flag
появление бленкера укаэывает отказ питания пкп, курсового приемника (маяка) ипи радиовысотомера при посадке no илс. — appearance of the flag indicates failure of adi primary power, localizer or radio altimeter when ils frequency is selected.
- отклонения от заданной скорости — speed (spd) flag
появление бленкера указывает на отказ питания датчика отклонения от заданной скорости. — appearance of spd flag indicates power loss to speed deviation transmitter.
- открыт (не виден в окошке) — flag is out of view flag window shows black
-, полосатый — stripped warning flag
-, полосатый (красно-белый) — barber-pole warning flag
-, полосковый — warning strip
- продольного канала (прибоpa нпп) — glide slope flag, gs flag
- сигнализирует об отказе или выключении — warning flag indicates failure or power loss
- счетчика дальномера — dme fail flag
-, фпажковый — warning flag
срабатывает (появляется на лицевой панели прибора) при прекращении подачи питания или неисправности прибора. — warning flags cover the appropriate displays' to indicate possible instrument malfunction or loss of power supply.
- (-) шторка (рис. 73) — warning shutter covers the digital display.
в окошке б. появляется (видно) черное попе (т.е. б. открыт) — flag window /cutout/ shows black
выпадение б. — warning flag appearance /coming into view, exposure/
на б. появляются белые секторы — flag window shows white sесtors, white sectors appear in flag window
появление б. — flag appearance
убирание б. — warning flag disappearance /coming out of view/, retraction out of view, /withdrawal/
выпадать (о бленкере) — appear, come into view
появляться (о бленкере) — appear, deflect into view
появление красного бленкеpa сигнализирует о неисправности прибора. — the red flag appears to indicate the instrument malfunction.
убираться (о бленкере) — disappear, deflect out of view; retract out of sightРусско-английский сборник авиационно-технических терминов > бленкер
14 в
аварийная ситуация в полетеin-flight emergencyаварийное табло в кабине экипажаcabin emergency lightаварийный клапан сброса давления в системе кондиционированияconditioned air emergency valveавтоматическая информация в районе аэродромаautomatic terminal informationавтомат тяги в системе автопилотаautopilot auto throttleаэровокзал в форме полумесяцаcrescent-shaped terminalаэродинамическая труба для испытаний на сваливание в штопорspin wind tunnelаэродинамическая труба для испытания моделей в натуральную величинуfull-scale wind tunnelбалансировка в горизонтальном полетеhorizontal trimбалансировка в полетеoperational trimбезопасная дистанция в полетеin-flight safe distanceбилет в одном направленииone-way ticketбилет на полет в одном направленииsingle ticketбоковой обзор в полетеsideway inflight viewв аварийной обстановкеin emergencyвведение в виражbankingвведение в действие пассажирских и грузовых тарифовfares and rates enforcementввод в эксплуатациюintroduction into serviceвводить воздушное судно в кренroll in the aircraftвводить в штопорput into the spinвводить в эксплуатацию1. go into service2. come into operation 3. place in service 4. enter service 5. introduce into service 6. put in service 7. put in operation вводить шестерни в зацеплениеmesh gearsв воздухе1. up2. aloft вентилятор в кольцевом обтекателеduct fanвертолет в режиме висенияhovering helicopterверхний обзор в полетеupward inflight viewветер в верхних слоях атмосферы1. upper wind2. aloft wind ветер в направлении курса полетаtailwindв заданном диапазонеwithin the rangeв западном направленииwestwardвзлет в условиях плохой видимостиlow visibility takeoffв зоне влияния землиin ground effectв зоне действия лучаon the beamвидимость в полетеflight visibilityвидимость в пределах допускаmarginal visibilityвидимость у земли в зоне аэродромаaerodrome ground visibilityвизуальная оценка расстояния в полетеdistance assessmentвизуальный контакт в полетеflight visual contactвизуальный ориентир в полетеflight visual cueв интересах безопасностиin interests of safetyвисение в зоне влияния землиhovering in the ground effectвихрь в направлении линии полетаline vortexв конце участкаat the end of segment(полета) в конце ходаat the end of stroke(поршня) в конце циклаat the end ofв начале участкаat the start of segment(полета) в начале циклаat the start of cycleв обратном направленииbackwardв ожидании разрешенияpending clearanceвозвращаться в пункт вылетаfly backвоздух в пограничном слоеboundary-layer airвоздух в турбулентном состоянииrough airвоздухозаборник в нижней части фюзеляжаbelly intakeвоздушная обстановка в зоне аэродромаaerodrome air pictureвоздушное судно в зоне ожиданияholding aircraftвоздушное судно в полете1. making way aircraft2. aircraft on flight 3. in-flight aircraft воздушное судно, дозаправляемое в полетеreceiver aircraftвоздушное судно, занесенное в реестрaircraft on registerвоздушное судно, находящееся в воздухеairborne aircraftвоздушное судно, находящееся в эксплуатации владельцаowner-operated aircraftвоздушное судно, нуждающееся в помощиaircraft requiring assistanceвоздушное судно, прибывающее в конечный аэропортterminating aircraftв подветренную сторонуaleeв поле зренияin sightв пределахwithin the frame ofв процессе взлетаduring takeoffв процессе полета1. while in flight2. in flight в процессе руленияwhile taxiingв рабочем состоянииoperationalв режимеin modeв режиме большого шагаin coarse pitchв режиме готовностиin alertв режиме малого шагаin fine pitchв режиме самоориентированияwhen castoringвремя в рейсе1. chock-to-chock time2. ramp-to-ramp time 3. block-to-block hours 4. block-to-block time 5. ramp-to-ramp hours время налета в ночных условияхnight flying timeвремя налета в часахhour's flying timeвремя фактического нахождения в воздухеactual airborne timeв рядabreastв случае задержкиin the case of delayв случае происшествияin the event of a mishapв случая отказаin the event of malfunctionв соответствии с техническими условиямиin conformity with the specificationsв состоянии бедствияin distressв состоянии готовностиwhen under wayв условиях обтеканияairflow conditionsв хвостовой части1. abaft2. aft вход в зону аэродрома1. entry into the aerodrome zone2. inward flight входить в глиссадуgain the glide pathвходить в зону глиссадыreach the glide pathвходить в круг движенияenter the traffic circuitвходить в облачностьenter cloudsвходить в разворот1. roll into the turn2. initiate the turn 3. enter the turn входить в условияpenetrate conditionsвходить в штопорenter the spinвходить в этап выравниванияentry into the flareвхожу в кругon the upwind legв целях безопасностиfor reasons of safetyвыполнять полет в зоне ожиданияhold over the aidsвыполнять полет в определенных условияхfly under conditionsвыполнять полет в режиме ожидания над аэродромомhold over the beaconвыполнять установленный порядок действий в аварийной ситуацииexecute an emergency procedureвыравнивание в линию горизонтаlevelling-offвыравнивание при входе в створ ВППrunway alignmentвысота в зоне ожиданияholding altitudeвысота в кабинеcabin pressureвысота плоскости ограничения препятствий в зоне взлетаtakeoff surface levelвысота полета в зоне ожиданияholding flight levelвысотомер, показания которого выведены в ответчикsquawk altimeterвыход в равносигнальную зонуbracketingв эксплуатацииin serviceв эксплуатациюin operationгасить скорость в полетеdecelerate in the flightголовокружение при полете в сплошной облачностиcloud vertigoгоризонт, видимый в полетеin-flight apparent horizonгосподство в воздухеair supremacyграница высот повторного запуска в полетеinflight restart envelopeгрубая ошибка в процессе полетаin flight blunderгруз, сброшенный в полетеjettisoned load in flightдавление в аэродинамической трубеwind-tunnel pressureдавление в кабинеcabin pressureдавление в невозмущенном потокеundisturbed pressureдавление в свободном потокеfree-stream pressureдавление в системе подачи топливаfuel supply pressureдавление в системе стояночного тормозаperking pressureдавление в скачке уплотненияshock pressureдавление в спутной струеwake pressureдавление в топливном бакеtank pressureдавление в тормозной системеbrake pressureдавление в точке отбораtapping pressureдавление на входе в воздухозаборникair intake pressureдальность видимости в полетеflight visual rangeдальность полета в невозмущенной атмосфереstill-air flight rangeданные в узлах координатной сеткиgrid-point dataданные о результатах испытания в воздухеair dataдвигатель, расположенный в крылеin-wing mountedдвигатель, установленный в мотогондолеnaccele-mounted engineдвигатель, установленный в отдельной гондолеpodded engineдвигатель, установленный в фюзеляжеin-board engineдвижение в зоне аэродромаaerodrome trafficдвижение в зоне аэропортаairport trafficдействия в момент касания ВППtouchdown operationsделать отметку в свидетельствеendorse the licenseделитель потока в заборном устройствеinlet splitterдержать шарик в центреkeep the ball centeredдозаправка топливом в полетеair refuellingдозаправлять топливом в полетеrefuel in flightдопуск к работе в качестве пилотаact as a pilot authorityдоставка пассажиров в аэропорт вылетаpickup serviceединый тариф на полет в двух направленияхtwo-way fareзавоевывать господство в воздухеgain the air supremacyзадатчик высоты в кабинеcabin altitude selectorзадержка в базовом аэропортуterminal delayзал таможенного досмотра в аэропортуairport customs roomзамер в полетеinflight measurementзаносить воздушное судно в реестрenter the aircraftзапись вибрации в полетеinflight vibration recordingзапись в формуляреlog book entryзапись переговоров в кабине экипажаcockpit voice recordingзапускать воздушное судно в производствоput the aircraft into productionзапускать двигатель в полетеrestart the engine in flightзапуск в воздухе1. air starting2. airstart запуск в полетеinflight startingзапуск в полете без включения стартераinflight nonassisted startingзапуск в режиме авторотацииwindmill startingзаход на посадку в режиме планированияgliding approachзаход на посадку в условиях ограниченной видимостиlow-visibility approachзона движения в районе аэродромаaerodrome traffic zoneизменение направления ветра в районе аэродромаaerodrome wind shiftизмерение шума в процессе летных испытанийflight test noise measurementиметь место в полетеbe experienced in flightимитация в полетеinflight simulationимитация полета в натуральных условияхfull-scale flightиндекс опознавания в коде ответчикаsquawk identиндикатор обстановки в вертикальной плоскостиvertical-situation indicatorинструктаж при аварийной обстановке в полетеinflight emergency instructionискусственные сооружения в районе аэродромаaerodrome cultureиспытание в аэродинамической трубеwind-tunnel testиспытание в воздухеair trialиспытание в гидроканалеtowing basing testиспытание в двухмерном потокеtwo-dimensional flow testиспытание вертолета в условиях снежного и пыльного вихрейrotocraft snow and dust testиспытание воздушного судна в термобарокамереaircraft environmental testиспытание в реальных условияхdirect testиспытание в режиме висенияhovering testиспытание в свободном полетеfree-flight testиспытание двигателя в полетеinflight engine testиспытания в барокамереaltitude-chamber testиспытания по замеру нагрузки в полетеflight stress measurement testsиспытываемый в полетеunder flight testиспытывать в полетеtest in flightисследование конфликтной ситуации в воздушном движенииair conflict searchканал в ступице турбиныturbine boreканал передачи данных в полетеflight data linkкарта особых явлений погоды в верхних слоях атмосферыhigh level significant weather chartкнопка запуска двигателя в воздухеflight restart buttonкок винта в сбореcone assyкомпенсация за отказ в перевозкеdenied boarding compensationкомпоновка кресел в салоне первого классаfirst-class seatingкомпоновка кресел в салоне смешанного классаmixed-class seatingкомпоновка кресел в салоне туристического классаeconomy-class seatingкомпоновка приборной доски в кабине экипажаcockpit panel layoutконтракт на обслуживание в аэропортуairport handling contractконтроль в зонеarea watchконтур уровня шума в районе аэропортаairport noise contourконцевой выключатель в системе воздушного суднаaircraft limit switchкривая в полярной системе координатpolar curveкрутящий момент воздушного винта в режиме авторотацииpropeller windmill torqueкурс в зоне ожиданияholding courseлетать в курсовом режимеfly heading modeлетать в режиме бреющего полетаfly at a low levelлетать в светлое время сутокfly by dayлетать в строюfly in formationлетать в темное время сутокfly at nightлетать по приборам в процессе тренировокfly under screenлететь в северном направленииfly northboundлетная подготовка в условиях, приближенных к реальнымline oriental flight trainingлиния руления воздушного судна в зоне стоянкиaircraft stand taxilaneлюк в крылеwing manholeманевр в полетеinflight manoeuvreмаршрут перехода в эшелона на участок захода на посадкуfeeder routeмаршрут полета в направлении от вторичных радиосредствtrack from secondary radio facilityмеры безопасности в полетеflight safety precautionsметеоусловия в пределах допускаmarginal weatherмеханизм для создания условий полета в нестабильной атмосфереrough air mechanismмеханизм открытия защелки в полетеmechanical flight release latchмешать обзору в полетеobscure inflight viewнабор высоты в крейсерском режимеcruise climbнавигация в зоне подходаapproach navigationнагрузка в полетеflight loadнагрузка в полете от поверхности управленияflight control loadнадежность в полетеinflight reliabilityнаправление в сторону подъемаup-slope directionнаправление в сторону уклонаdown-slope directionнаправляющийся вbound forнаработка в часах1. running hours2. endurance hours на участке маршрута в восточном направленииon the eastbound legнеобходимые меры предосторожности в полетеflight reasonable precautionsнеожиданное препятствие в полетеhidden flight hazardнеправильно оцененное расстояние в полетеmisjudged flight distanceнеправильно принятое в полете решениеimproper in-flight decisionнижний обзор в полетеdownward inflight viewноситель информации в виде металлической лентыmetal tape mediumноситель информации в виде пластиковой пленкиplastic tape mediumноситель информации в виде фольгиengraved foil mediumноситель информации в виде фотопленкиphotographic paper mediumобзор в полетеinflight viewоборудование для полетов в темное время сутокnight-flying equipmentобслуживание в процессе стоянкиstanding operationобслуживание пассажиров в городском аэровокзалеcity-terminal coach serviceобучение в процессе полетовflying trainingобъем воздушных перевозка в тоннах грузаairlift tonnageобязанности экипажа в аварийной обстановкеcrew emergency dutyобязательно к выполнению в соответствии со статьейbe compulsory Articleограничения, указанные в свидетельствеlicense limitationsожидание в процессе полетаhold en-routeопознавание в полетеaerial identificationопробование систем управления в кабине экипажаcockpit drillопыт работы в авиацииaeronautical experienceорганы управления в кабине экипажаflight compartment controlsосадки в виде крупных хлопьев снегаsnow grains precipitationосадки в виде ледяных крупинокice pellets precipitationослабление видимости в атмосфереatmospheric attenuationослабление сигналов в атмосфереatmospheric lossослаблять давление в пневматикеdeflate the tireосмотр в конце рабочего дняdaily inspectionособые меры в полетеin-flight extreme careоставаться в горизонтальном положенииremain levelотводить воздух в атмосферуdischarge air overboardотказ в перевозке1. denial of carriage2. denied boarding 3. bumping отработка действий на случай аварийной обстановки в аэропортуaerodrome emergency exerciseотражатель в механизме реверса тягиpower reversal ejectorотсутствие ветра в районеaerodrome calmоценка пилотом ситуации в полетеpilot judgementошибка в настройкеalignment errorпадение в перевернутом положенииtip-over fallпарить в воздухеsailперебои в зажиганииmisfireперебои в работе двигателя1. rough engine operations2. engine trouble переводить воздушное судно в горизонтальный полетput the aircraft overперевозка с оплатой в кредитcollect transportationпередача в пункте стыковки авиарейсовinterline transferпередвижной диспетчерский пункт в районе ВППrunway control vanпередний обзор в полетеforward inflight viewпереход в режим горизонтального полетаpuchoverпереходить в режим набора высотыentry into climbповторный запуск в полетеflight restartподача топлива в систему воздушного суднаaircraft fuel supplyподниматься в воздухago aloftпожар в отсеке шассиwheel-well fireпоиск в условном квадратеsquare searchполет в восточном направленииeastbound flightполет в зоне ожидания1. holding2. holding flight полет в направлении на станциюflight inbound the stationполет в направлении от станцииflight outbound the stationполет в невозмущенной атмосфереstill-air flightполет в нормальных метеоусловияхnormal weather operationполет в обоих направленияхback-to-back flightполет в одном направленииone-way flightполет в пределах континентаcoast-to-coast flightполет в режиме висенияhover flightполет в режиме ожиданияholding operationполет в режиме ожидания на маршрутеholding en-route operationполет в связи с особыми обстоятельствамиspecial event flightполет в сложных метеоусловияхbad-weather flightполет в строюformation flightполет в условиях болтанки1. bumpy-air flight2. turbulent flight полет в условиях отсутствия видимостиnonvisual flightполет в условиях плохой видимостиlow-visibility flightполет в установленной зонеstandoff flightполет в установленном сектореsector flightполетное время, продолжительность полета в данный деньflying time todayполет по кругу в районе аэродромаaerodrome traffic circuit operationполет с дозаправкой топлива в воздухеrefuelling flightполеты в районе открытого моряoff-shore operationsполеты в светлое время сутокdaylight operationsполеты в темное время сутокnight operationsположение амортизатора в обжатом состоянииshock strut compressed positionположение в воздушном пространствеair positionпомпаж в воздухозаборникеair intake surgeпопадание в порыв ветраgust penetrationпопадание в турбулентностьturbulence penetrationпорядок действий в аварийной обстановкеemergency procedureпорядок эксплуатации в зимних условияхsnow planпосадка в режиме авторотации в выключенным двигателемpower-off autorotative landingпосадка в светлое время сутокday landingпосадка в сложных метеоусловияхbad weather landingпосадка в темное время сутокnight landingпотери в воздухозаборникеintake lossesпоток в промежуточных аэродромахpick-up trafficпотолок в режиме висенияhovering ceilingправила полета в аварийной обстановкеemergency flight proceduresпредставлять в закодированном видеsubmit in codeпредупреждение столкновений в воздухеmid air collision controlпрепятствие в зоне захода на посадкуapproach area hazardпрепятствие в районе аэропортаairport hazardприбывать в зону аэродромаarrive over the aerodromeприведение в действиеactuationприведение эшелонов в соответствиеcorrelation of levelsприводить в действиеactuateприводить воздушное судно в состояние летной годностиreturn an aircraft to flyable statusприводить в рабочее состояниеprepare for serviceприводить в состояние готовностиalert toпригодный для полета только в светлое время сутокavailable for daylight operationприспособление для захвата объектов в процессе полетаflight pick-up equipmentпроверено в полетеflight checkedпроверка в кабине экипажаcockpit checkпроверка в полетеflight checkпроверка в процессе облетаflyby checkпрогноз в графическом изображенииpictorial forecastпродолжительность в режиме висенияhovering enduranceпродувать в аэродинамической трубеtest in the wind tunnelпроизводить посадку в самолетemplaneпроисшествие в районе аэропортаairport-related accidentпрокладка в системе двигателяengine gasketпрокладка маршрута в районе аэродромаterminal routingпропуск на вход в аэропортairport laissez-passerпросвет в облачностиcloud gapпространственная ориентация в полетеinflight spatial orientationпространственное положение в момент удараattitude at impactпротивобликовая защита в кабинеcabin glare protectionпрофиль волны в свободном полеfree-field signatureпрофиль местности в районе аэродромаaerodrome ground profileпружина распора в выпущенном положенииdownlock bungee spring(опоры шасси) пункт назначения, указанный в авиабилетеticketed destinationпункт назначения, указанный в купоне авиабилетаcoupon destinationработа в режиме запуска двигателяengine start modeработа только в режиме приемаreceiving onlyрадиолокационный обзор в полетеinflight radar scanningрадиус действия радиолокатора в режиме поискаradar search rangeразворот в процессе планированияgliding turnразворот в режиме висенияhovering turnразворот в сторону приближенияinbound turnразворот в сторону удаленияoutbound turnразмещать в воздушном суднеfill an aircraft withразница в тарифах по классамclass differentialразрешение в процессе полета по маршрутуen-route clearanceразрешение на полет в зоне ожиданияholding clearanceрасстояние в миляхmileageрасстояние в милях между указанными в билете пунктамиticketed point mileageрасчетное время в путиestimated time en-routeрегистрация в зале ожиданияconcourse checkрегулятор давления в кабинеcabin pressure regulatorрежим воздушного потока в заборнике воздухаinlet airflow scheduleрежим малого газа в заданных пределахdeadband idleречевой регистратор переговоров в кабине экипажаcockpit voice recorderруководство по производству полетов в зоне аэродромаaerodrome rulesрулежная дорожка в районе аэровокзалаterminal taxiwayсближение в полетеair missсваливание в штопорspin stallсдавать в багажpark in the baggageсдвиг ветра в зоне полетаflight wind shearсигнал бедствия в коде ответчикаsquawk maydayсигнал входа в глиссадуon-slope signalсигнал действий в полетеflight urgency signalсигнализация аварийной обстановки в полетеair alert warningсигнал между воздушными судами в полетеair-to-air signalсигнальные огни входа в створ ВППrunway alignment indicator lightsсистема предупреждения конфликтных ситуаций в полетеconflict alert systemсистема распространения информации в определенные интервалы времениfixed-time dissemination systemсистема регулирования температуры воздуха в кабинеcabin temperature control systemскольжение в направлении полетаforwardslipскорость в условиях турбулентности1. rough-air speed2. rough airspeed скрытое препятствие в районе ВППrunway hidden hazardсложные метеоусловия в районе аэродромаaerodrome adverse weatherслужба управления движением в зоне аэродромаaerodrome control serviceслужба управления движением в зоне аэропортаairport traffic serviceсмесеобразование в карбюратореcarburetionс момента ввода в эксплуатациюsince placed in serviceснежный заряд в зоне полетаinflight snow showersснижение в режиме авторотацииautorotative descentснижение в режиме планированияgliding descentснижение в режиме торможенияbraked descentснимать груз в контейнереdischarge the cargoсобытие в результате непреднамеренных действийunintentional occurrenceсовершать посадку в направлении ветраland downwindсогласованность в действияхcoherenceсписание девиации в полетеairswingingсписание девиации компаса в полетеair compass swingingсписание радиодевиации в полетеairborne error measurementспособность выполнять посадку в сложных метеорологических условияхall-weather landing capabilityсрок службы в часах налетаflying lifeсрываться в штопор1. fall into the spin2. fail into the spin ставить в определенное положениеposeстолкновение в воздухе1. mid-air collision2. aerial collision схема в зоне ожиданияholding patternсхема входа в диспетчерскую зонуentry procedureсхема входа в зону ожиданияholding entry procedureсхема движения в зоне аэродромаaerodrome traffic patternсхема полета в зоне ожиданияholding procedureсхема полета по приборам в зоне ожиданияinstrument holding procedureсчетчик пройденного километража в полетеair-mileage indicatorсчитывание показаний приборов в полетеflight instrument readingтариф в местной валютеlocal currency fareтариф в одном направленииdirectional rateтариф для полета в одном направленииsingle fareтариф за перевозку грузов в специальном приспособлении для комплектованияunit load device rateтариф на полет в ночное время сутокnight fareтариф на полет с возвратом в течение сутокday round trip fareтелесное повреждение в результате авиационного происшествияaccident serious injuryтемпература в данной точкеlocal temperatureтемпература воздуха в трубопроводеduct air temperatureтемпература газов на входе в турбинуturbine entry temperatureтемпература на входе в турбинуturbine inlet temperatureтраектория полета в зоне ожиданияholding pathтрение в опорахbearing frictionтренировка в барокамереaltitude chamber drillтурбулентность в атмосфере без облаковclear air turbulenceтурбулентность в облакахturbulence in cloudsтурбулентность в спутном следеwake turbulenceтяга в полетеflight thrustугроза применения взрывчатого устройства в полетеinflight bomb threatудельный расход топлива на кг тяги в часthrust specific fuel consumptionудерживать контакты в замкнутом положенииhold contacts closedудостоверяющая запись в свидетельствеlicence endorsementуказания по условиям эксплуатации в полетеinflight operational instructionsуказатель входа в створ ВППrunway alignment indicatorуказатель высоты в кабинеcabin altitude indicatorуказатель местоположения в полетеair position indicatorуказатель перепада давления в кабинеcabin pressure indicatorуказатель уровня в бакеtank level indicatorуменьшение ограничений в воздушных перевозкахair transport facilitationупаковывать в контейнереcontainerizeупаковывать груз в контейнереcontainerize the cargoуправление в зонеarea controlуправление в зоне аэродромаaerodrome controlуправление в зоне захода на посадкуapproach controlуровень шума в населенном пунктеcommunity noise levelуровень шумового фона в кабине экипажаflight deck aural environmentуровень шумового фона в районе аэропортаacoustic airport environmentуровень электролита в аккумулятореbattery electrolyte levelусилие в системе управленияcontrol forceусловия в полетеin-flight conditionsусловия в районе аэродромаaerodrome environmentусловия в районе ВППrunway environmentусловия нагружения в полетеflight loading conditionsусловное обозначение в сообщении о ходе полетаflight report identificationусловное обозначение события в полетеflight occurrence identificationустанавливать наличие воздушной пробки в системеdetermine air in a systemустановка в определенное положениеpositioningустановка в положение для захода на посадкуapproach settingустановленные обязанности в полетеprescribed flight dutyустановленный в гондолеnacelle-mountedустойчивость в полетеinflight stabilityустройство отображения информации в кабине экипажаcockpit displayустройство разворота в нейтральное положениеself-centering deviceуточнение плана полета по сведениям, полученным в полетеinflight operational planningухудшение в полетеflight deteriorationучастие в расследованииparticipation in the investigationформа крыла в планеwing planformхарактеристика в зоне ожиданияholding performanceцифровая система наведения в полетеdigital flight guidance systemчартерный рейс в связи с особыми обстоятельствамиspecial event charterчисло оборотов в минутуrevolutions per minuteчрезвычайное обстоятельство в полетеflight emergency circumstanceшаг в режиме торможенияbraking pitchшасси, убирающееся в фюзеляжinward retracting landing gearшлиц в головке винтаscrew head slotэксплуатировать в заданных условияхoperate under the conditionsэксплуатировать в соответствии с техникой безопасностиoperate safetyэтапа полета в пределах одного государстваdomestic flight stageэтап входа в глиссадуglide capture phaseэтап полета, указанный в полетном купонеflight coupon stageэшелонирование в зоне ожиданиеholding stack15 программируемый логический контроллер
- speicherprogrammierbare Steuerung, f
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего. Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы. Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7. Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series. Рис. 4. Резервированный контроллер FCP270.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA). Рис. 5. Контроллер AC800M.
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Русско-немецкий словарь нормативно-технической терминологии > программируемый логический контроллер
16 программируемый логический контроллер
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Русско-английский словарь нормативно-технической терминологии > программируемый логический контроллер
17 программируемый логический контроллер
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Русско-французский словарь нормативно-технической терминологии > программируемый логический контроллер
18 промышленная сеть верхнего уровня
промышленная сеть верхнего уровня
коммуникационная сеть верхнего уровня
сеть операторского уровня
Сеть верхнего уровня АСУ ТП.
Сеть передачи данных между операторскими станциями, контроллерами и серверами.
[ http://kazanets.narod.ru/NT_PART2.htm]В данной статье речь пойдет о коммуникационных сетях верхнего уровня, входящих в состав АСУ ТП. Их еще называют сетями операторского уровня, ссылаясь на трехуровневую модель распределенных систем управления.
Сети верхнего уровня служат для передачи данных между контроллерами, серверами и операторскими рабочими станциями. Иногда в состав таких сетей входят дополнительные узлы: центральный сервер архива, сервер промышленных приложений, инженерная станция и т.д. Но это уже опции.
Какие сети используются на верхнем уровне?
В отличие от стандартов полевых шин, здесь особого разнообразия нет. Фактически, большинство сетей верхнего уровня, применяемых в современных АСУ ТП, базируется на стандарте Ethernet (IEEE 802.3) или на его более быстрых вариантах Fast Ethernet и Gigabit Ethernet. При этом, как правило, используется полный стек коммуникационных протоколов TCP/IP. В этом плане сети операторского уровня очень похожи на обычные ЛВС, применяемые в офисных приложениях. Широкое промышленное применение сетей Ethernet обусловлено следующими очевидными моментами:
1. Промышленные сети верхнего уровня объединяют множество операторских станций и серверов, которые в большинстве случаев представляют собой персональные компьютеры. Стандарт Ethernet отлично подходит для организации подобных ЛВС; для этого необходимо снабдить каждый компьютер лишь сетевым адаптером (NIC, network interface card). Коммуникационные модули Ethernet для промышленных контроллеров просты в изготовлении и легки в конфигурировании. Стоит отметить, что многие современные контроллеры уже имеют встроенные интерфейсы для подключения к сетям Ethernet.
2. На рынке существует большой выбор недорого коммуникационного оборудования для сетей Ethernet, в том числе специально адаптированного для промышленного применения.
3. Сети Ethernet обладают большой скоростью передачи данных. Например, стандарт Gigabit Ethernet позволяет передавать данные со скоростью до 1 Gb в секунду при использовании витой пары категории 5. Как будет понятно дальше, большая пропускная способность сети становится чрезвычайно важным моментом для промышленных приложений.
4. Очень частым требованием является возможность состыковки сети АСУ ТП с локальной сетью завода (или предприятия). Как правило, существующая ЛВС завода базируется на стандарте Ethernet. Использование единого сетевого стандарта позволяет упростить интеграцию АСУ ТП в общую сеть предприятия, что становится особенно ощутимым при реализации и развертывании систем верхнего уровня типа MES (Мanufacturing Еxecution System).
Однако у промышленных сетей верхнего уровня есть своя специфика, обусловленная условиями промышленного применения. Типичными требованиями, предъявляемыми к таким сетям, являются:
1. Большая пропускная способность и скорость передачи данных. Объем трафика напрямую зависит от многих факторов: количества архивируемых и визуализируемых технологических параметров, количества серверов и операторских станций, используемых прикладных приложений и т.д.
В отличие от полевых сетей жесткого требования детерминированности здесь нет: строго говоря, неважно, сколько времени займет передача сообщения от одного узла к другому – 100 мс или 700 мс (естественно, это не важно, пока находится в разумных пределах). Главное, чтобы сеть в целом могла справляться с общим объемом трафика за определенное время. Наиболее интенсивный трафик идет по участкам сети, соединяющим серверы и операторские станции (клиенты). Это связано с тем, что на операторской станции технологическая информация обновляется в среднем раз в секунду, причем передаваемых технологических параметров может быть несколько тысяч. Но и тут нет жестких временных ограничений: оператор не заметит, если информация будет обновляться, скажем, каждые полторы секунды вместо положенной одной. В то же время если контроллер (с циклом сканирования в 100 мс) столкнется с 500-милисекундной задержкой поступления новых данных от датчика, это может привести к некорректной отработке алгоритмов управления.
2. Отказоустойчивость. Достигается, как правило, путем резервирования коммуникационного оборудования и линий связи по схеме 2*N так, что в случае выхода из строя коммутатора или обрыва канала, система управления способна в кратчайшие сроки (не более 1-3 с) локализовать место отказа, выполнить автоматическую перестройку топологии и перенаправить трафик на резервные маршруты. Далее мы более подробно остановимся на схемах обеспечения резервирования.
3. Соответствие сетевого оборудования промышленным условиям эксплуатации. Под этим подразумеваются такие немаловажные технические меры, как: защита сетевого оборудования от пыли и влаги; расширенный температурный диапазон эксплуатации; увеличенный цикл жизни; возможность удобного монтажа на DIN-рейку; низковольтное питание с возможностью резервирования; прочные и износостойкие разъемы и коннекторы. По функционалу промышленное сетевое оборудование практически не отличается от офисных аналогов, однако, ввиду специального исполнения, стоит несколько дороже.
Рис. 1. Промышленные коммутаторы SCALANCE X200 производства Siemens (слева) и LM8TX от Phoenix Contact (справа): монтаж на DIN-рейку; питание от 24 VDC (у SCALANCE X200 возможность резервирования питания); поддержка резервированных сетевых топологий.Говоря о промышленных сетях, построенных на базе технологии Ethernet, часто используют термин Industrial Ethernet, намекая тем самым на их промышленное предназначение. Сейчас ведутся обширные дискуссии о выделении Industrial Ethernet в отдельный промышленный стандарт, однако на данный момент Industrial Ethernet – это лишь перечень технических рекомендации по организации сетей в производственных условиях, и является, строго говоря, неформализованным дополнением к спецификации физического уровня стандарта Ethernet.
Есть и другая точка зрения на то, что такое Industrial Ethernet. Дело в том, что в последнее время разработано множество коммуникационных протоколов, базирующихся на стандарте Ethernet и оптимизированных для передачи критичных ко времени данных. Такие протоколы условно называют протоколами реального времени, имея в виду, что с их помощью можно организовать обмен данными между распределенными приложениями, которые критичны ко времени выполнения и требуют четкой временной синхронизации. Конечная цель – добиться относительной детерминированности при передаче данных. В качестве примера Industrial Ethernet можно привести:
1. Profinet;
2. EtherCAT;
3. Ethernet Powerlink;
4. Ether/IP.
Эти протоколы в различной степени модифицируют стандартный стек TCP/IP, добавляя в него новые алгоритмы сетевого обмена, диагностические функции, методы самокорректировки и функции синхронизации, оставляя при этом канальный и физический уровни Ethernet неизменными. Это позволяет использовать новые протоколы передачи данных в существующих сетях Ethernet с использованием стандартного коммуникационного оборудования.
Теперь рассмотрим конкретные конфигурации сетей операторского уровня.
На рисунке 2 показана самая простая – базовая конфигурация. Отказ любого коммутатора или обрыв канала связи ( link) ведет к нарушению целостности всей системы. Единичная точка отказа изображена на рисунке красным крестиком.
Рис. 2. Нерезервированная конфигурация сети верхнего уровняТакая простая конфигурация подходит лишь для систем управления, внедряемых на некритичных участках производства (водоподготовка для каких-нибудь водяных контуров или, например, приемка молока на молочном заводе). Для более ответственных технологических участков такое решение явно неудовлетворительно.
На рисунке 3 показана отказоустойчивая конфигурация с полным резервированием. Каждый канал связи и сетевой компонент резервируется. Обратите внимание, сколько отказов переносит система прежде, чем теряется коммуникация с одной рабочей станцией оператора. Но даже это не выводит систему из строя, так как остается в действии вторая, страхующая рабочая станция.
Рис. 3. Полностью резервированная конфигурация сети верхнего уровняРезервирование неизбежно ведет к возникновению петлевидных участков сети – замкнутых маршрутов. Стандарт Ethernet, строго говоря, не допускает петлевидных топологий, так как это может привести к зацикливанию пакетов особенно при широковещательной рассылке. Но и из этой ситуации есть выход. Современные коммутаторы, как правило, поддерживают дополнительный прокол Spanning Tree Protocol (STP, IEEE 802.1d), который позволяет создавать петлевидные маршруты в сетях Ethernet. Постоянно анализируя конфигурацию сети, STP автоматически выстраивает древовидную топологию, переводя избыточные коммуникационные линии в резерв. В случае нарушения целостности построенной таким образом сети (обрыв связи, например), STP в считанные секунды включает в работу необходимые резервные линии, восстанавливая древовидную структуры сети. Примечательно то, что этот протокол не требует первичной настройки и работает автоматически. Есть и более мощная разновидность данного протокола Rapid Spanning Tree Protocol (RSTP, IEEE 802.1w), позволяющая снизить время перестройки сети вплоть до нескольких миллисекунд. Протоколы STP и RSTP позволяют создавать произвольное количество избыточных линий связи и являются обязательным функционалом для промышленных коммутаторов, применяемых в резервированных сетях.
На рисунке 4 изображена резервированная конфигурация сети верхнего уровня, содержащая оптоволоконное кольцо для организации связи между контроллерами и серверами. Иногда это кольцо дублируется, что придает системе дополнительную отказоустойчивость.
Рис. 4. Резервированная конфигурация сети на основе оптоволоконного кольцаМы рассмотрели наиболее типичные схемы построения сетей, применяемых в промышленности. Вместе с тем следует заметить, что универсальных конфигураций сетей попросту не существует: в каждом конкретном случае проектировщик вырабатывает подходящее техническое решение исходя из поставленной задачи и условий применения.
[ http://kazanets.narod.ru/NT_PART2.htm]Тематики
Синонимы
EN
Русско-английский словарь нормативно-технической терминологии > промышленная сеть верхнего уровня
19 отклонение
с.1) ( отказ) rejet mотклоне́ние про́сьбы — rejet d'une requête
2) (отход в сторону, уклон) écart m, écartement m, déviation fотклоне́ние от ку́рса — écart par rapport à un itinéraire
отклоне́ние от но́рмы — écart par rapport à la norme
отклоне́ние от те́мы — digression f
3) физ. déclinaison f; déflexion f ( лучей)отклоне́ние магни́тной стре́лки — déclinaison de l'aiguille [egɥij] aimantée
* * *n1) gener. digression (от темы), divagation (от темы), divergence, déclination, déclinement, déviation (Dev.), rejet, variance, non-conformité (L'opérateur doit participer à l'analyse des non-conformités dans la mesure de ses compétences.), delta, aberrance (от средней величины), aberration (от нормы), entorse, irrégularité (от чего-л.), affolement, déportement, détournement, écart2) Av. déflexion (воздушных струй)3) navy. variation (магнитной стрелки)4) med. diversion, déviation (от нормы), inclinaison, déflexion (головки плода, линий в ЭКГ)5) colloq. parenthèse6) obs. divertissement7) liter. maladie8) eng. anomalie, biaisement (от прямой линии), braquage (ðæôà), dérive, dérogation, dévoîment, excursion, fluctuation, débattement, déflection, dérivation (от курса), inflexion (ôæœà), inflexion (лучей)9) construct. écartement, détour10) law. anomalie (от среднего, типичного)11) metal. diffraction, dérivation12) phys. déclinaison, déflexion, inflexion13) IT. déplacement (регулируемой величины), divergence (напр. параметра), rejet (напр. запроса)20 взлет (взлеты)
takeoff (take-offs)
траектория взлета начинается от точки страгивания самолета на линии старта (лс) до точки момента выхода на высоту 400 м (над уровнем впп в точке отрыва самолета), либо до момента, к которому заканчивается переход от взлетной к полетной конфигурации и достигается скорость полета, равная 1,25 vc (рис. 112) — the takeoff path extendes from a standing start to a point in the takeoff at which the airplane is 1,500 feet above the takeoff surface, or at which the transition from the takeoff to the en route configuration is completed and a speed 1.25 vs is reached.
- без впрыска воды — dry (thrust) takeoft
- без разбега (вертолета) — no-run /vertical, stationary/ takeoff
-, безопасный — safety takeoff
-, вертикальный — vertical takeoff
- на скв (при работающей системе курсовертикали) — takeoff with altitude and heading reference system in use
- по ветру — downwind takeoff
- по приборам — instrument takeoff
- (вертолета) по-самолетному — running takeoff, ground run takeoff
-, прерванный — aborted /refused/ takeoff
взлет, обычно прекращаемый при возникновении аварийной ситуации, напр. отказ двигателя, пожар — a takeoff aborted in emergency such as engine failure, fire.
-, прерванный (вертолета) — rejected takeoff
прерванный взлет должен выполняться с плавными переходами между элементами маневра. — the rejected takeoff must be accomplished with a safe smooth transition between each stage of maneuver.
-, прерванный (при скорости близкой к v1) — discontinued takeoff
-, продолженный — continued takeoff
- против ветра — upwind takeoff
- по вертолетному (вертолета в зоне влияния земли) — vertical /towering/ takeoff
- по вертолетному с разгоном в зоне (вне зоны) влияния земли — vertifical takeoff with acceleration in (out of) ground effect
- с аэродрома с мягким покрытием — soft field takeoff on soft field takeoff do not use brakes.
- с боковым ветром — crosswind takeoff
- с впрыском воды (водометаноловой смеси) — wet (thrust) takeoff
- с закрылками, выпущенными на 15о — takeoff with flaps at 15о, 15о (15-deg) flap takeoff
- с места (вертолета или вертикально-взлетающего самолета) — stationary takeoff
- с ракетным ускорителем — rocket-assisted takeoff (rato)
- с реактивным ускорителем — jet-assisted takeoff (jato)
- с тормозов — brake-release takeoff
- с уменьшением шума на местности — noise abatement takeoff
-, ускоренный — prompt takeoff
на в. — on /at, during, in/ takeoff, when taken off
ожидание в. — ground hold
последовательноеть в. — takeoff sequence
прекращение в. — takeoff abortion /rejection/
при в. — on /at, during/ takeoff
разгон при в. — takeoff acceleration
разрешение на в. — takeoff clearance
схема в. — takeoff pattern
безопасно продолжать в. — proceed safely with the takeoff
прерывать в. (вертолета) — reject the takeoff
прерывать в. (самолета) — abort /refuse/ the takeoffРусско-английский сборник авиационно-технических терминов > взлет (взлеты)
Страницы- 1
- 2
См. также в других словарях:
отказ линии — Период потери последовательных пакетов, который может длиться несколько секунд, а иногда и несколько минут. Модель сети имитирует эффект отказа линии в основном сегменте посредством выбрасывания блоков последовательных пакетов во время отказа… … Справочник технического переводчика
отказ линии местной телефонной сети — Событие, заключающееся в нарушении работоспособного состояния хотя бы одной жилы или провода линии местной телефонной сети. [ГОСТ Р 50889 96] Тематики телефонные сети Обобщающие термины эксплуатационная надежность линий местных телефонных сетей … Справочник технического переводчика
отказ линии местной телефонной сети — 163 отказ линии местной телефонной сети: Событие, заключающееся в нарушении работоспособного состояния хотя бы одной жилы или провода линии местной телефонной сети Источник: ГОСТ Р 50889 96: Сооружения местных телефонных сетей линейные. Термины и … Словарь-справочник терминов нормативно-технической документации
Отказ линии местной телефонной сети — 1. Событие, заключающееся в нарушении работоспособного состояния хотя бы одной жилы или провода линии местной телефонной сети Употребляется в документе: ГОСТ Р 50889 96 Сооружения местных телефонных сетей линейные. Термины и определения … Телекоммуникационный словарь
отказ — 3.14 отказ: Событие, заключающееся в нарушении работоспособного состояния машины, которое наступает, когда машина утрачивает одну или несколько своих основных функций. Примечание Отказ машины обычно происходит в том случае, когда один или… … Словарь-справочник терминов нормативно-технической документации
отказ в разъединении — Неудачная попытка разрыва соединения, возникающая вследствие неисправности оборудования. Это приводит к тому, что период разъединения линии становятся чрезвычайно большим. [Л.М. Невдяев. Телекоммуникационные технологии. Англо русский толковый… … Справочник технического переводчика
отказ кабеля — Событие, заключающееся в нарушении работоспособного состояния одной, нескольких или всех электрических цепей кабеля, одного, нескольких или всех оптических волокон кабеля на строительных длинах, в муфтах или оконечных устройствах на кабельной… … Справочник технического переводчика
отказ — Франц. refus. Один из многочисленных терминов Ю. Кристевой периода активного формирования телькелевского варианта французской версии постмодернизма. Вместе с такими понятиями, как «негативность», разнородность, гетерогенность, отказ служит для… … Постмодернизм. Словарь терминов.
Отказ заемщика — Применительно к линии ипотечного кредита, риск того, что заемщики кредитов, которые должны быть закрыты, предпочтут отказаться от контракта … Инвестиционный словарь
РД 45.047-99: Линии передачи волоконно-оптические на магистральной и внутризоновых первичных сетях ВСС России. Техническая эксплуатация. Руководящий технический материал — Терминология РД 45.047 99: Линии передачи волоконно оптические на магистральной и внутризоновых первичных сетях ВСС России. Техническая эксплуатация. Руководящий технический материал: 3.1.18 «АВАРИЯ» параметры качества вышли за пределы… … Словарь-справочник терминов нормативно-технической документации
средняя наработка на отказ — 01.04.29 средняя наработка на отказ [ mean time between failures; MTBF]: Суммарная наработка в часах до отказа компонента, сборки или системы. Примечание 1 Определение на основе определения 191 12 08 по МЭК 60050 191 Примечание 2 MTBF является… … Словарь-справочник терминов нормативно-технической документации
 18+© Академик, 2000-2024
18+© Академик, 2000-2024- Обратная связь: Техподдержка, Реклама на сайте
Экспорт словарей на сайты, сделанные на PHP, Joomla, Drupal, WordPress, MODx.
Перевод: с русского на все языки
со всех языков на русский- Со всех языков на:
- Русский
- С русского на:
- Все языки
- Английский
- Немецкий
- Французский